КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия регулятора
|
|
|
|
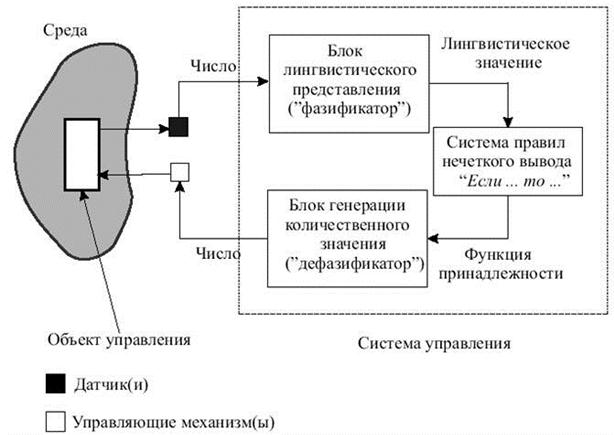
Таким образом, моделью объекта управления и среды является их лингвистическое описание; блок принятия решений работает как последовательность "Если..., то..." правил.
Возникает ситуация, когда элементы одной схемы описываются на разных "языках": в среде значения признаков – некоторые числа, отражающие значения физических измеряемых величин, а в модели управления значения признаков - качественные понятия. Система управления должна взять с объекта управления некоторые числа и выдать на объект опять же некоторые конкретные числа.
Для этого система управления имеет два интерфейса: представления физического значения признака в лингвистическом виде ("фазификатор") и представления получившегося в результате нечетких рассуждений лингвистического значения управляемого параметра в количественном виде ("дефазификатор").
Пример: нечеткий регулятор
Приведем еще один пример использования аппарата нечеткой логики, на этот раз – в задаче управления.
Рассмотрим замкнутую систему регулирования, представленную на рис. где через О обозначен объект управления, через P – регулятор, а через u, y, e, x – соответственно входной сигнал системы, ее выходной сигнал, сигнал ошибки (рассогласования), поступающий на вход регулятора, и выходной сигнал регулятора.
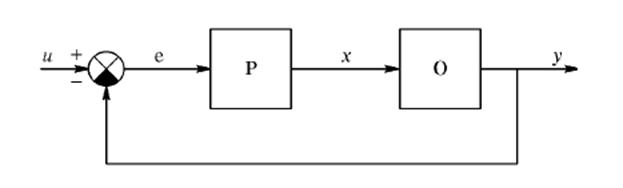
В рассматриваемой системе регулятор вырабатывает управляющий сигнал x в соответствии с выбранным алгоритмом регулирования. Покажем, что в данном случае для выработки такого сигнала применимы рассмотренные выше методы аппарата нечеткой логики.
Предположим, что функции регулятора выполняет микроконтроллер, при этом аналоговый сигнал е ограничен диапазоном [-1, 1] и преобразуется в цифровую форму аналого-цифровым преобразователем (АЦП) с дискретностью 0,25, а выходной сигнал регулятора х формируется с помощью цифроаналогового преобразователя (ЦАП) и имеет всего 5 уровней:
-1, -0,5, 0, 0,5, 1.
Принимая во внимание данные уровни, введем лингвистические переменные:
A1: большой положительный,
А2: малый положительный,
А3: нулевой,
А4: малый отрицательный,
А5: большой отрицательный,
и на дискретном множестве возможных значений сигнала рассогласования е определим функции принадлежности так, как это приведено в табл. 1.
Таблица 1. Значения функций принадлежности
| -1 | -0,75 | -0,5 | -0,25 | 0,25 | 0,5 | 0,75 | |||
| A1(e) | 0,3 | 0,7 | |||||||
| A2(e) | 0,3 | 0,7 | 0,7 | 0,3 | |||||
| A3(e) | 0,3 | 0,7 | 0,7 | 0,3 | |||||
| A4(e) | 0,3 | 0,7 | 0,7 | 0,3 | |||||
| A5(e) | 0,7 | 0,3 |
Предположим, далее, что функционирование регулятора определяется следующими правилами (надо сказать, типичными для задачи управления):
П1: если e=A3 и Dе=A3, то x=0;
П2: если e=A2 и Dе=A2, то x=-05;,
П3: если e=A4 и Dе=A4, то x=1;
П4: если e=A1 и Dе=A1, то x=-1;
где Dе – первая разность сигнала ошибки в текущий дискретный момент времени.
Заметим, что набор правил может быть, вообще говоря, и каким-то другим.
Если, например, используется упрощенный алгоритм нечеткого вывода, то при значениях, скажем, е = 0,25 и Dе = 0,5 имеем:
 и x1=0;
и x1=0;
 и x2=-0,5;
и x2=-0,5;
 и x3=1;
и x3=1;
 и x4=-1;
и x4=-1;
и выход регулятора:
 .
.
Аналогичным образом значения выходного сигнала регулятора рассчитываются при других значениях е и Dе.
Отметим, что при проектировании подобных («нечетких») регуляторов основным (и не формализуемым) этапом является задание набора нечетких правил. Другие аспекты: выбор формы функций принадлежности, алгоритма приведения к четкости и т.п. представляются задачами более простыми.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 540; Нарушение авторских прав?; Мы поможем в написании вашей работы!