КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кінематичні компоновки маніпуляторів
|
|
|
|
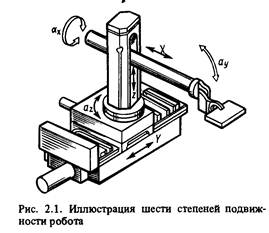
Для повного здійснення просторового руху необхідно мати в маніпуляторі шість ступенів рухливості (мал. 2.1), з них три потрібні для приведення кінця маніпулятора в необхідну точку простору (вони іменуються транспортними або переносними ступенями рухливості), ще три - для отримання необхідної кутової орієнтації захватного пристрою або інструменту (вони називаються орієнтуючими ступенями рухливості). При цьому реалізується універсальний маніпулятор, здатний проводити будь-які переміщення усередині своєї робочої зони.
КІНЕМАТИКА БАГАТОЛАНКОВИХ МАНІПУЛЯТОРІВ
Лекція №2
Загальна схема маніпулятора.
Виконавчим пристроєм робота є маніпулятор, забезпечений на вільному кінці захватним пристроєм або яким-небудь інструментом. Ланки маніпулятора з'єднуються один з одним за допомогою кінематичних пар п'ятого порядку (по класифікації в теорії механізмів і машин), обертальних і поступальних. Кожна кінематична пара приводиться в дію від керованого приводу. Всі ці приводи з'єднані єдиною системою управління робота для здійснення координованого руху всіх ланок маніпулятора відповідно до програми виконання технологічного процесу.

У багатьох випадках такої універсальності за умов вживання не вимагається, і тоді створюються маніпулятори з трьома, чотирма або п'ятьма ступенями рухливості. В деяких випадках необхідно мати надмірні ступені рухливості понад шість. При цьому одне і те ж положення і орієнтація на кінці маніпулятора можуть бути досягнуті при різній загальній конфігурації ланок (див., наприклад, мал. 2.2 у разі руху в одній площині). Це необхідне для обходу яких-небудь перешкод, що є в робочій зоні маніпулятора.
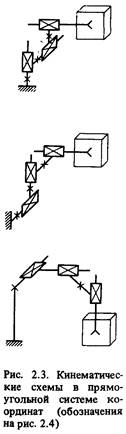
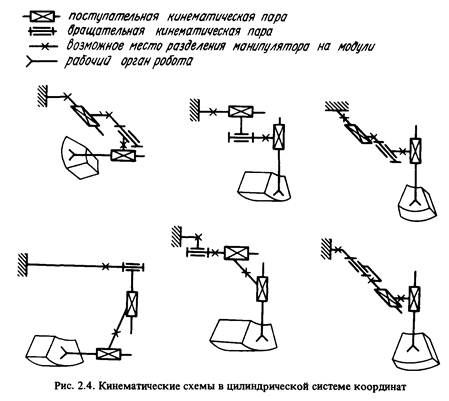
Існує велика різноманітність кінематичних схем маніпуляторів промислових роботів. Вони пов'язані з різними системами координат. На мал. 2.3-2.6 показані компоновки трьох перших ступенів рухливості маніпулятора (переносних), що визначають три просторові координати точок робочої зони. Зображені в зменшеному масштабі і зразкові контури робочої зони в різних системах координат. Саме цими переносними ступенями рухливості в різних системах координат визначаються форма і розміри робочої зони робота. Що додаються потім орієнтуючі ступені рухливості мало на це впливають.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 548; Нарушение авторских прав?; Мы поможем в написании вашей работы!