КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Двигатели постоянного тока (ДПТ)
|
|
|
|
Синхронные двигатели (СД)
Асинхронные двигатели (АД)

Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
Синхронная скорость и скольжение АД
 ,
,  ,
,
где f – частота сети; р – число пар полюсов.
Зависимость момента от скольжения (формула Клосса)
 ,
,
где  ,
,  - критические момент и скольжение двигателя;
- критические момент и скольжение двигателя;  - перепад скорости, соответствующий критическому моменту; U – напряжение сети; l, р, Lk, r2¢ - перегрузочная способность, число пар полюсов, индуктивность короткого замыкания и приведенное сопротивление ротора двигателя.
- перепад скорости, соответствующий критическому моменту; U – напряжение сети; l, р, Lk, r2¢ - перегрузочная способность, число пар полюсов, индуктивность короткого замыкания и приведенное сопротивление ротора двигателя.
Достоинство асинхронных двигателей – простота конструкции. К недостаткам следует отнести: низкие энергетические показатели (КПД и коэффициент мощности), большой ток холостого хода (около 50% от номинального), квадратичная зависимость критического момента от напряжения, самая низкая перегрузочная способность среди электрических машин, а также малая величина воздушного зазора.
Скорость АД регулируется изменением следующих параметров:
· сети (напряжение, частота);
· двигателя (число пар полюсов, индуктивность, сопротивление ротора).

Естественная механическая характеристика асинхронного двигателя имеет вид кривой, как показано на рисунке. Рабочая часть характеристики является жесткой. В асинхронных двигателях с фазным ротором в зависимости от сопротивления в цепи ротора имеется семейство искусственных характеристик, (w0=const, Dwkº R, M k=const). При этом, чем больше сопротивление цепи ротора, тем мягче характеристика (при закороченном роторе R= 0 естественная характеристика).
Реостатное регулирование благодаря своей простоте широко применялось в подъёмно-транспортных устройствах. Недостатки: ступенчатое изменение скорости, невысокое быстродействие, большие потери энергии.
Взаимодействие намагничивающих сил статора и ротора возможно только при одинаковом числе пар полюсов их обмоток. Поэтому регулирование числом пар полюсов применимо только для АД с короткозамкнутым ротором, обмотка ротора которого автоматически образует такое же число пар полюсов, что и обмотка статора. Двухскоростные двигатели изготавливают как с двумя независимыми статорными обмотками, так и однообмоточными с секционированием обмоток.
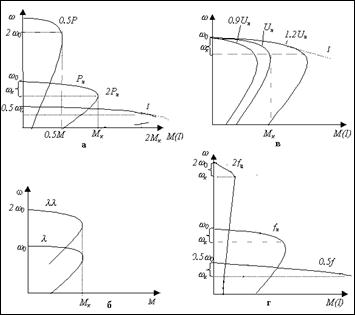
В первом случае (рис. а) двигатель имеет повышенные габариты, низкие КПД и коэффициент мощности, много неиспользованной меди (w0º1/ p, Dwkº1/ p, M kº p).
Наиболее просто переключаются числа пар полюсов в отношении 1:2. Для этого обмотка каждой фазы выполняется из двух секций. При изменении направления тока в одной из них меняется число пар полюсов. Обычно переключают обмотки статора со звезды на двойную звезду, или с треугольника на двойную звезду. Переход на двойную звезду сопровождается уменьшением в два раза числа пар полюсов, т. е. увеличением в 2 раза скорости. При этом перегрузочная способность остается постоянной.
Регулирование скорости АД включением в цепь статора дополнительной индуктивности осуществляется за счет перераспределения напряжения между ними (w0=const, Dwkº1/ Lk, M kº1/ Lk). Ввиду малого диапазона регулирования и снижения перегрузочной способности на практике почти на применяется.
Регулирование скорости изменением напряжения ухудшает электромеханические свойства АД (w0=const, Dwk=const, M kº U2). При уменьшении напряжения резко падает перегрузочная способность двигателя (при U =0.9 U н критический момент уменьшается на 19%), при увеличении – возрастает ток и увеличивается нагрев обмотки статора (рис. в). Поэтому регулирование возможно в небольшом диапазоне.
Скорость АД пропорциональна частоте питающей сети (w0º f, Dwk=const, M kº1/ f 2). При увеличении частоты скорость увеличивается, критический момент уменьшается, а соответствующий ему перепад скорости остается постоянным (рис. г). С уменьшением частоты перегрузочная способность возрастает, однако увеличивается ток, т. е. нагрев двигателя.
Если изменяеть напряжение и частоту двигателя по частотному закону U/f = const, то магнитный поток и критический момент двигателя остаются неизменными (w0º f, Dwk=const, M k=const). Регулирование возможно в широком диапазоне при постоянной жесткости характеристик.
Асинхронные двигатели используются практически во всех видах установок, при этом в большинстве случаев распространение получили асинхронные двигатели с короткозамкнутым ротором.
С увеличением мощности двигателя увеличивается его номинальные значение КПД и коэффициента мощности, фактические значения которых в зависимости от коэффициента загрузки двигателя приближенно оцениваются данными таблицы.
| Коэффициент загрузки k з | КПД | коэффициент мощности |
| 0,1 | 0,48 | 0,34 |
| 0,2 | 0,68 | 0,56 |
| 0,3 | 0,79 | 0,70 |
| 0,4 | 0,86 | 0,79 |
| 0,5 | 0,93 | 0,87 |
| 0,6 | 0.97 | 0,93 |
| 0,7 | 1,0 | 0,97 |
| 0,8 | 1,01 | 1,0 |
| 0,9 | 1,01 | 1,0 |
| 1,0 | 1,0 |
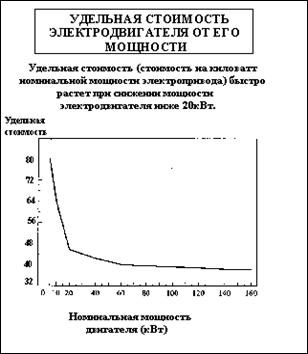
Двигатели малой мощности отличаются непропорциональной большой удельной стоимостью (стоимость 1 кВт) по сравнению с крупными электрическими двигателями. Приведенный график показывает, что удельная стоимость перестает существенно изменяться при мощностях двигателя выше 60 кВт.
Двигатели мощностью ниже 200 кВт обычно имеют напряжение 380 В, более 300 кВт - 6 (10) кВ, и двигатели мощностью 200 - 300 кВт имеют напряжение либо 380 В либо 6 (10) кВ.
Капитальные затраты учитываются в первую очередь при принятии решения о приобретении двигателя, но с учетом срока службы электродвигателя, эксплуатационные затраты (стоимость потребленной электроэнергии и обслуживания) на порядок и более превосходят капитальные.
В синхронных машинах статор запитывается от трехфазной сети переменного тока, а к ротору подводится постоянный ток возбуждения. Механическая характеристика синхронного двигателя является абсолютно жесткой и не зависит от нагрузки двигателя.
Запускается синхронный двигатель – асинхронным способом пуска.
Электромагнитный момент неявнополюсного двигателя
 ,
,
где m – число фаз; Е – ЭДС; хс – реактивное синхронное сопротивление.
Синхронная машина обладает самыми высокими энергетическими показателями. Она характеризуется высокими КПД, коэффициентом мощности, надежностью в следствии большой величины воздушного зазора, пропорциональной зависимостью перегрузочной способности от напряжения питания.
Достоинством синхронного двигателя является также возможность регулирования реактивной мощности в зависимости от тока возбуждения. При опережающем соsj двигатель генерирует реактивную энергию. Компенсирующий эффект синхронного двигателя условной мощности 1000 кВ×А приведен в таблице.
В среднем удельный расход активной мощности составляет 0,01-0,05 кВт/квар.
Используются двигатели в установках с постоянной нагрузкой и редкими пусками (турбомеханизмы, мощные конвейера).
| Параметры двигателя | Значения показателей при соs j | |||||
| 0,95 | 0.9 | 0,85 | 0,8 | 0,7 | ||
| Мощность: полная, кВ×А | ||||||
| реактивная, квар. | ||||||
| Дополнительное увеличение полной мощности на получение соответствующей реактивной, кВ×А |
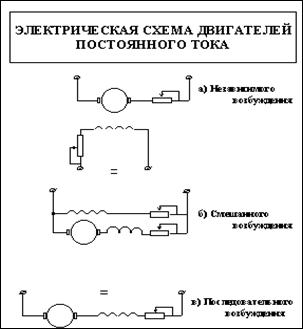
Различают двигатели постоянного тока в зависимости от схемы подсоединения обмотки якоря и обмотки возбуждения:
· независимого (параллельного) возбуждения;
· смешанного возбуждения;
· последовательного возбуждения.
Общее дифференциальное уравнение ДПТ
 ,
,
где  - электромеханическая постоянная времени двигателя;
- электромеханическая постоянная времени двигателя;  - электромагнитная постоянная двигателя; сд = kФ – постоянная двигателя.
- электромагнитная постоянная двигателя; сд = kФ – постоянная двигателя.
Уравнение электромеханической характеристики
 .
.
Двигатели независимого возбуждения имеют жесткую естественную механическую характеристику (1), двигатели последовательного (2) и смешанного возбуждения (3) - мягкую.

Скорость двигателя регулируется изменением:
· напряжения якоря;
· сопротивления цепи якоря;
· магнитного потока.
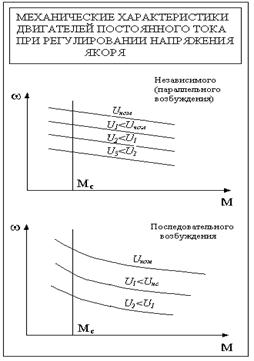
В двигателях постоянного тока наиболее рациональным способом регулирования частоты вращения является изменение напряжения, приложенного к якорю двигателя. На рисунке приведены естественная и искусственные характеристики. Регулирование напряжением осуществляется в большом диапазоне скоростей с постоянным моментом и жесткостью (для ДТП независимого возбуждения), вверх и вниз от естественной характеристики. Регулирование экономичное, однако требуется регулятор напряжения (выпрямитель).
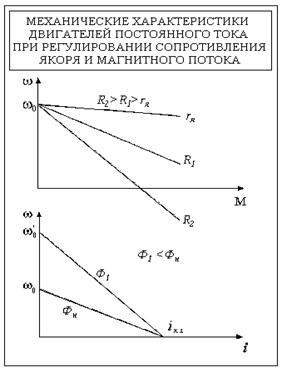
С увеличением сопротивления реостата в цепи якоря увеличивается наклон характеристики, регулирование вниз от естественной характеристики. При большой величине реостата характеристики становятся мягкими и двигатель работает неустойчиво. Дляполучения устойчивой работы привода применяют шунтирование якоря ДТП. Регулирование не экономично. Энергия скольжения (регулирования) выделяется в виде тепла на дополнительном реостате.
При уменьшении потока возбуждения увеличивается скорость идеального холостого хода и статический перепад скорости. Ток короткого замыкания
 .
.
Регулирование с постоянной мощностью. Достоинства – простота и экономичность. Недостатки - регулирование только вверх в небольшом диапазоне (10-15%). При этом размагничивается магнитная система электродвигателя и падает перегрузочная способность.
Достоинство привода с двигателями постоянного тока – отличные регулировочные свойства (работа в четырех квадрантах, управление по трем параметрам). Недостаток – низкая надежность вследствии наличия механического коммутационного узла (коллектора).
Двигатели независимого возбуждения используются в шахтных подъемниках, крановых установках, специальных видах приводов, двигатели последовательного возбуждения - в электрическом транспорте.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 3262; Нарушение авторских прав?; Мы поможем в написании вашей работы!