КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Виды равновесия твердого тела
|
|
|
|
Условия равновесия системы тел
Для равновесия1 тела человека (системы тел) необходимо, чтобы главный вектор и главный момент внешних сил были равны нулю, а все внутренние силы обеспечивали сохранение позы (формы системы).
Если главный вектор и главный момент равны нулю, тело не сдвинется и не повернется, его линейное и угловое ускорения равны нулю. Для системы, тел эти условия также необходимы, но уже недостаточны. Равновесие тела человека как системы тел требует еще сохранения позы тела. Когда мышцы достаточно сильны и человек умеет использовать их силу, он удержится в очень трудном положении. А менее сильному человеку такой позы не удержать, хотя по расположению и величине внешних сил равновесие возможно. У разных людей существуют свои предельные позы, которые они еще в состоянии сохранять.
Вид равновесия твердого тела определяется по действию силы тяжести в случае сколь угодно малого отклонения: а) безразличное равновесие — действие силы тяжести не изменяется; б) устойчивое — оно всегда возвращает тело в прежнее положение (возникает момент устойчивости); в) неустойчивое — действие силы тяжести всегда вызывает опрокидывание тела (возникает момент опрокидывания); г) ограниченно-устойчивое — до потенциального барьера положение тела восстанавливается (возникает момент устойчивости), после него тело опрокидывается (возникает момент опрокидывания).
В механике твердого тела различают три вида равновесия: безразличное, устойчивое и неустойчивое. Эти виды различаются по поведению тела, незначительно отклоняемого от уравновешенного положения. Когда тело человека полностью сохраняет позу («отвердение»), к нему применимы законы равновесия твердого тела.
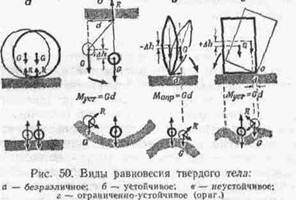
Безразличное равновесие характерно тем, что при любых отклонениях сохраняется равновесие. Шар, цилиндр, круговой конус на горизонтальной плоскости (нижняя опора) можно повернуть как угодно, и они останутся в покое. Линия действия силы тяжести (G) в таком теле (или, как говорят, короче линия тяжести) всегда проходит через точку опоры, совпадает с линией действия силы опорной реакции (R); они уравновешивают друг друга. В спортивной технике безразличного равновесия ни на суше, ни в воде практически не встречается.
Устойчивое равновесие характерно возвратом в прежнее положение при любом отклонении. Оно устойчиво при сколь угодно малом отклонении по двум причинам; а) центр тяжести тела поднимается выше (Dh), создается запас потенциальной энергии в поле земного тяготения; б) линия тяжести (G) не проходит через опору, появляется плечо силы тяжести (d) и возникает момент силы тяжести (момент устойчивости М уст=Gd), возвращающий тело (с уменьшением потенциальной энергии) в прежнее положение. Такое равновесие встречается у человека при верхней опоре. Например, гимнаст в висе на кольцах; рука, свободно висящая в плечевом суставе. Сила тяжести тела сама возвращает тело в прежнее положение.
Неустойчивое равновесие характерно тем, что сколь угодно малое отклонение вызывает еще большее отклонение и тело само в прежнее положение вернуться не может. Таково положение при нижней опоре, когда тело имеет точку или линию (ребро тела) опоры. При отклонении тела: а) центр тяжести опускается ниже (—Dh), убывает потенциальная энергия в поле земного тяготения; б) линия тяжести (G) с отклонением тела удаляется от точки опоры, увеличиваются плечо (d) и момент силы тяжести (момент опрокидывания Мопр. =Gd ); он все дальше отклоняет тело от прежнего положения. Неустойчивое равновесие в природе практически почти не осуществимо.
В физических упражнениях чаще всего встречается еще один вид равновесия, когда имеется площадь опоры, расположенная внизу (нижняя опора). При незначительном отклонении тела центр его тяжести поднимается (+Dh) и появляется момент устойчивости (Mуст=Gd). Налицо признаки устойчивого равновесия; момент силы тяжести тела вернет его в прежнее положение. Но это продолжается лишь при отклонении до определенных границ, пока линия тяжести не дойдет до края площади опоры. В этом положении уже возникают условия неустойчивого равновесия: при дальнейшем отклонении тело опрокидывается; при малейшем отклонении в обратную сторону — возвращается в прежнее положение. Границе площади опоры соответствует вершина «потенциального барьера» (максимум потенциальной энергии). В пределах между противоположными барьерами («потенциальная яма») во всех направлениях осуществляется ограниченно-устойчивое равновесие.
2.4. Устойчивость твердого тела и системы тел
Устойчивость объекта характеризуется его способностью, противодействуя нарушению равновесия, сохранять положение. Различают статические показатели устойчивости как способность сопротивляться нарушению равновесия и динамические как способность восстановить равновесие.
Статическим показателем устойчивости твердого тела служит (в ограниченно-устойчивом равновесии) коэффициент устойчивости. На рис. 51, а опрокидывающий момент создается опрокидывающей силой (Fопр), приложенной на плече (h) относительно линии опрокидывания (О), вокруг которой происходит отклонение тела. Момент устойчивости относительно той же линии опрокидывания возникает с начала приложения силы Fопр. Наибольшим он становится в начале опрокидывания (предельный момент устойчивости), далее плечо силы тяжести G уменьшается и момент устойчивости уменьшается до нуля (в граничном положении — ОЦТ над линией опрокидывания).
а — коэффициент устойчивости тела; б, в — угол устойчивости (a};г — статическая и динамическая устойчивость системы тел; д — поверхность опоры (пунктир) и площадь эффективной опоры (заштрихована) (ориг.)
Коэффициент устойчивости равен отношению предельного момента устойчивости к моменту опрокидывающему. Когда коэффициент устойчивости покоящегося тела равен единице и больше нее, опрокидывания нет. Если же он меньше единицы, равновесие не может быть сохранено.
Однако сопротивление только этих двух механических факторов (двух моментов сил) для системы тел, если она может изменять конфигурацию, не исчерпывает действительной картины. Предположим, что сопротивляющийся борец (рис. 51, г), согнув ноги, опустит строго вертикально центр тяжести своего тела. От этого ни сила тяжести его тела, ни ее плечо, а значит, и момент устойчивости не изменятся. Но понизится точка приложения Fonp плечо этой силы уменьшится, меньше станет ее момент. Таким способом борец может увеличить коэффициент устойчивости своего тела путем уменьшения опрокидывающего момента. Отклонив назад тело, он не изменит опрокидывающий момент, но увеличит плечо силы тяжести своего тела и момент устойчивости. Здесь он тоже выиграет в статической устойчивости. Борец, напрягая мышцы и упираясь в ковер, создает еще внешнюю горизонтальную силу (силу трения), направленную в его сторону, уменьшая этим действие опрокидывающей тяги. Последнее зависит также от готовности мышц борца противодействовать внезапному ее приложению. Обманными действиями можно резко ухудшить их готовность и малой тягой вызвать опрокидывание. Самое существенное для биомеханической системы не в пассивном использовании силы тяжести тела, а в активных мышечных тягах, сохраняющих и изменяющих позу тела. В системе тел каждое звено должно быть в равновесии, сохраняя ее конфигурацию (позу тела человека).
Следовательно, коэффициент устойчивости тела и зафиксированной системы тел характеризует статическую устойчивость как способность сопротивляться нарушению равновесия. У человека при определении устойчивости всегда надо еще учитывать активное противодействие мышечных тяг и готовность к сопротивлению.
Динамическим показателем устойчивости твердого тела служит угол устойчивости. Это угол, образованный линией действия силы тяжести и прямой, соединяющей центр тяжести с соответствующим краем площади опоры (см. рис. 51, б, в). Станем отклонять тело, пока линия тяжести не дойдет до границы площади опоры (граничное положение тела — вершина потенциального барьера). У тела, поставленного стоймя (рис. 51, б), база устойчивости (/i) меньше, чем у того же тела, лежащего плашмя (/2) (см. рис. 51, в). Значит, линия тяжести ближе к границе, за которой начнется опрокидывание. Центр тяжести надо поднять для опрокидывания в первом случае на меньшую высоту (Dh1), чем во втором (Dh2) Угол устойчивости в первом случае (a1) явно меньше, чем во втором (a2).
Физический смысл угла устойчивости состоит в том, что он равен углу поворота (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Сумма двух углов устойчивости в одной плоскости рассматривается как угол равновесия в этой плоскости. Он характеризует запас устойчивости в данной плоскости, т. е. определяет размах перемещений центра тяжести до возможного опрокидывания в ту или другую сторону (например, у слаломиста при спуске на лыжах, гимнастки на бревне, борца в стойке).
В случае равновесия биомеханической системы дляприменения динамических показателей устойчивости нужно учесть существенные уточнения.
Во-первых, площадь эффективной опоры человека не всегда совпадает с поверхностью опоры. У человека, как и у твердого тела, поверхность опоры ограничена линиями, соединяющими крайние точки опоры (или внешние края нескольких площадей опоры) (см. рис. 51, д). Но у человека часто граница площади эффективной опоры расположена внутри контура опоры, так как мягкие ткани (стопа босиком) или слабые звенья (концевые фаланги пальцев в стойке на руках на полу) не могут уравновесить нагрузку. Поэтому линия опрокидывания смещается кнутри от края опорной поверхности, площадь эффективной опоры меньше площади опорной поверхности.
Во-вторых, человек никогда не отклоняется всем телом относительно линии опрокидывания (как кубик), а перемещается относительно осей каких-либо суставов, не сохраняя полностью позы (например, при положении стоя —движения в голеностопных суставах).
В-третьих, при приближении к граничному положению нередко становится трудно сохранить позу и наступает не просто опрокидывание «отвердевшего тела» вокруг линии опрокидывания, а изменение позы с падением. Это существенно отличается от отклонения и опрокидывания твердого тела вокруг грани опрокидывания (кантование).
Таким образом, углы устойчивости в ограниченно-устойчивом равновесии характеризуют динамическую устойчивость как способность восстановить равновесие. При определении устойчивости тела человека необходимо также учитывать границы площади эффективной опоры, надежность сохранения позы до граничного положения тела и реальную линию опрокидывания.
В физических упражнениях часто встречается удерживающая связь (жесткая). Тогда условия сохранения равновесия требуют учета двусторонней связи путем рассмотрения соответствующих реактивных сил, вызванных такой связью.
3.СОХРАНЕНИЕ И ВОССТАНОВЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА
Человек может не только сохранять равновесие, но и восстанавливать его в случаях нарушения. Отличие равновесия биомеханических систем от равновесия твердых физических тел заключается не в наличии особых законов механики для живых систем, а в более сложном их использовании благодаря особенностям живых систем.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 4377; Нарушение авторских прав?; Мы поможем в написании вашей работы!