КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматический режим
|
|
|
|
Структурная схема автоматического малогабаритного рулевого АРМ-2
5. Структурная схема адаптивного авторулевого на судне.
Требования ИМО к авторулевым.
План лекции:
1. Требования к авторулевым ИМО и классификационными обществами разных стран.
2. Основные положения.
3. Переключение режимов.
4. Сигнализация.
5. Органы управления авторулевым.
6. Ограничение перекладок руля.
7. Интерфейс.
Рекомендованная литература:
1. Березин С.Я., Тетюев Б.А. Системы автоматического управления движением судна по курсу. – Л., Судостроение, 1990 – 256 с.
2. Вагущенко Л.Л. Системы автоматического управления движением судна. – Одесса, Латстар, 2002 – 310 с.
3. Вагущенко Л.Л., Кошовий А.А. Автоматизовані комплекси судноводіння. – Київ, КВІЦ, 2001 – 292 стр.
Основные теоретические положения
Требования к авторулевым определены ИМО и классификационными обществами разных стран. Касаясь требований ИМО, необходимо отметить следующее.
Общие требования к электронным навигационным средствам определены Резолюцией ИМО А.694(17) - Recommendation on General Requirements for Shipborn Radio Equipment Forming Part of the Global Maritime Distress and Safety System (GMDSS) and for Electronic Navigational Aids. - 1991. Это - общие замечания к дизайну пультов управления, размерам и количеству органов управления, требования к настройке, к освещению, к работоспособности при различных погодных условиях и при изменении параметров электропитания, к шумности, к радиации и т.д. В полной мере эти требования относятся и к авторулевым.
Специальные требования к авторулевым обычных и скоростных судов установлены соответственно Резолюциями ИМО:
- А. 342(ГХ) - Recommendation on Performance Standards for Automatic Pilots.-1975,
- A. 822(19) - Performance Standards for Automatic Steering Aids (Automatic Pilots) for High Speed Craft.-1995.
Обобщенные требования к авторулевым могут быть представлены в следующем виде.
Основные положения. Авторулевые должны нормально работать в следующих условиях:
• При скоростях хода от минимальной маневренной до максимальной. Для обычных судов максимальная скорость не превышает 30 узлов, для скоростных - 70 узлов;
• При угловых скоростях поворота до 20%;
• В диапазоне широт от 70N до 70S.
Необходимо в авторулевых предусматривать два вида управления: автоматическое и ручное.
Основной пульт управления авторулевых должен устанавливаться в диаметральной плоскости судна.
Требуется, чтобы в соединении с необходимыми датчиками информации в диапазоне перечисленных выше условий АР обеспечивали стабилизацию курса с точностью ±2°.
В режиме «Автомат» авторулевые в пределах способности судна должны выполнять повороты с предварительно заданной угловой скоростью либо радиусом поворота.
В автоматическом режиме управления следует иметь возможность выполнения экстренного поворота судна на любой угол, вплоть до полной циркуляции. После отмены команды экстренного поворота должно обеспечиваться возвращение на заданный курс и дальнейшее действие автоматического управления.
Авторулевые должны обладать способностью вручную или автоматически подстраиваться к изменению динамических характеристик судна при различной погоде и к степени загрузки судна.
Адаптивный авторулевой должен оставаться работоспособным при выходе из строя блока адаптации.
Требуется, чтобы в АР была возможность подключения гирокомпаса и/или электронного магнитного компаса.
Авторулевой должен снабжаться квалифицированным описанием его погрешностей, являющихся следствием высокой скорости, ускорений, изменений курса, состояния моря и ошибок подключенных к АР датчиков информации.
Переключение режимов. Требуется, чтобы переход с ручного на автоматическое управление и наоборот осуществлялся при любом положении руля.
Переключение с автоматического режима на ручной должно выполняться в любых условиях, включая выход из строя схемы автоматического управления.
При установке автоматического режима авторулевой должен выводить судно на предварительно заданный курс. Не следует иметь возможности иного изменения заданного курса, чем судовым персоналом.
Органы управления АР необходимо располагать близко друг к другу и к устройству отображения параметров управления.
Требуется обеспечивать индикацию активного в данный момент режима управления.
Сигнализация. Авторулевой следует снабжать звуковой и визуальной сигнализацией. Она должна:
• Сообщать о выходе из строя АР или о неполадках в его электропитании, которые могут влиять на безопасность функционирования;
• Подавать четкий звуковой сигнал при отклонениях от курса, превышающих заданный предел;
• Информировать об отсутствии сигнала датчика АР или о низком качестве его информации, которое может влиять на работоспособность АР.
Средства сигнализации АР следует располагать близко от его органов управления либо устройства отображения.
Органы управления авторулевым. На пульте АР необходимо иметь простой и надежно действующий орган для ручного управления рулем. Им может быть штурвал, ручка или кнопки.
Требуется в авторулевом иметь ручную или автоматическую настройку к изменению условий погоды.
В режиме автоматического управления задание курса следования может быть аналоговым или цифровым. Орган аналоговой установки должен поворачиваться вправо/влево при задании изменения курса вправо/влево. Для обычных поворотов судна в АР необходимо иметь только один орган задания нового курса. На установленный курс следования активация любых других органов АР не должна влиять.
Ограничение перекладок руля. Требуется иметь возможность в
автоматическом режиме управления ограничивать величину
максимальной перекладки руля. Величина вводимого ограничения
должна индицироваться.
Разрешение свободного рыскания. Авторулевой должен иметь средства, предупреждающие излишние включения рулевого привода при нормальном рыскании на волнении.
Интерфейс. Устройства АР для подключения датчиков информации должны удовлетворять протоколу IEC 1162, 1994 г., установленном Международной электротехнической комиссией.
Вопросы для самоконтроля.
1. Какие резолюции отмечают общие требования к электронным навигационным средствам.
2. В каких услових должны нормально работать авторулевые.
3. Переключение режимов в авторулевых.
4. Какой сигнализацией авторулевой должен быть снабжен.
5. Органы управления авторулевым.
Функциональные возможности современных авторулевых, используемых на судах.
План лекции:
1. Пульт авторулевого.
2. Авторулевой NAVpilot производства FURUNO.
Рекомендованная литература:
1. Березин С.Я., Тетюев Б.А. Системы автоматического управления движением судна по курсу. – Л., Судостроение, 1990 – 256 с.
2. Вагущенко Л.Л. Системы автоматического управления движением судна. – Одесса, Латстар, 2002 – 310 с.
3. Вагущенко Л.Л., Кошовий А.А. Автоматизовані комплекси судноводіння. – Київ, КВІЦ, 2001 – 292 стр.
Основные теоретические положения
Пульт авторулевого. Количество функций управления АР и дизайн его пульта зависят от типа авторулевого. Таких типов в настоящее время достаточно много. Поэтому схематично рассмотрим лишь один из вариантов оформления пульта адаптивного АР с конкретными функциями (рис. 8.3).
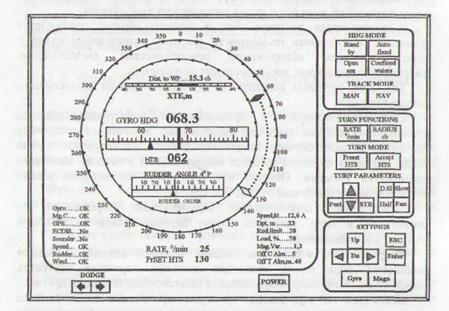
Рис. 8.3 - Схема пульта адаптивного авторулевого
Этот пульт включает в себя панель управления, дисплей рулевого и многофункциональный штурвал (на рисунке не показан). Панель управления включает три секции:
• Режимов управления;
• Задания элементов поворота;
• Ручных установок.
Переключатели режимов и функций управления состоят из зависимых кнопок с подсветкой, подтверждающих их активацию. (Вагущенко Л.Л. и др. САУ движением судна стр. 222-231).
Авторулевой NAVpilot производства FURUNO
Авторулевой NAVpilot производства FURUNO - действительно уникальный прибор на рынке авторулевых. Его отличие от других приборов заключается в том, что NAVpilot постоянно анализирует параметры судовождения, повышая таким образом эффективность навигации от рейса к рейсу. Основные параметры настраиваются динамически в зависимости от скорости судна, дифферента, осадки, влияния ветра и течений, мертвой зоны руля, погоды и др. Эти параметры сохраняются в памяти системы и постоянно корректируются для достижения оптимального результата в конкретных условиях.
| Авторулевой | |||||

| 
| 
| |||
| NAVpilot -500 | NAVpilot -611 | NAVpilot -520 | |||
NAVpilot постоянно поддерживает заданный курс, но судно может отклониться от курса в результате влияния течения и ветра.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 4237; Нарушение авторских прав?; Мы поможем в написании вашей работы!