КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматический малогабаритный рулевой АРМ-2
|
|
|
|
Автоматические бесконтактные авторулевые АБР и АР.
7. Схема работы Авторулевого
8. Основные законы управления АР.
9. Внешние датчики информации.
10. Структурная схема системы автоматического управления курсом судна.
Рекомендованная литература:
1. Березин С.Я., Тетюев Б.А. Системы автоматического управления движением судна по курсу. – Л., Судостроение, 1990 – 256 с.
2. Вагущенко Л.Л. Системы автоматического управления движением судна. – Одесса, Латстар, 2002 – 310 с.
3. Вагущенко Л.Л., Кошовий А.А. Автоматизовані комплекси судноводіння. – Київ, КВІЦ, 2001 – 292 стр.
Основные теоретические положения
Назначение. Авторулевые (АР) служат для ручного и автоматического управления движением судна по курсу на полном морском ходу и на маневренных скоростях.
Обычно с помощью АР решаются задачи стабилизации курса и выполнения поворотов. На некоторые АР возлагают также задачу определения курса следования в зависимости от заданного маршрута и отклонения судна от него.
На судах мирового флота используются авторулевые различных фирм, изготовленные в разное время. Кроме того, классификационные общества разных стран и судовладельцы предъявляют неодинаковые требования к компоновке, видам управления, средствам контроля и сигнализации авторулевых. Поэтому многообразие авторулевых достаточно велико. Охарактеризовать подробно все применяемые на судах типы авторулевых не представляется возможным. Для рассмотрения основных задач управления судном достаточно проанализировать только основные, существенные при управлении свойства авторулевых. Ниже дается обобщенная характеристика авторулевых, в которой особенности АР конкретных типов могут быть не отражены.
Классификация авторулевых. В настоящее время эксплуатируются АР различных типов.
В зависимости от элементной базы АР подразделяются на
• электромеханические,
• электронные аналоговые,
• электронные цифровые.
В зависимости от вида рулевого привода, которым будет управлять АР, различают авторулевые:
· Для электрических РП,
· Для электрогидравлических РП с насосами постоянной производительности,
· Для электрогидравлических РП с насосами регулируемой производительности.
· Для различных видов РП.
В зависимости от вида настройки выделяют авторулевые:
♦ С ручной настройкой (неадаптивные АР),
♦ с частичной адаптацией,
♦ адаптивные авторулевые.
При правильной настройке АР потери в эксплуатационной скорости судна могут быть снижены на 2*3%, а расход топлива - на 5+8%.
Типовые аналоговые авторулевые.
К основным техническим требованиям, предъявляемым к авторулевым, относятся следующие: они должны удерживать судно на с точностью 10 при скорости более 6 уз независимо от условий плавания и загрузки судна. Средняя амплитуда рыскания по курсу в заданном интервале скоростей для состояния моря до 3 баллов должна быть в пределах 10, до 6 баллов -2-30, свыше 6 баллов -4-50. Основной рулевой привод должен обеспечивать перекладку руля с одного борта на другой за время, не превышающие 28 с.
Авторулевые имеют обычно несколько режимов работы: ручной, следящий, автоматический.
Электромеханические авторулевые разрабатывались как автономные устройства управления, вследствие чего при решении задач автоматического плавания по маршруту они не в полной мере отвечают требованиям взаимодействия с автоматизированными судовыми навигационными подсистемами. Кроме того, они имеют и свои собственные недостатки, вот некоторые из них. Во-первых, это выработка частых неэффективных перекладок руля на волнении. Обычные авторулевые отвечают на любые отклонения от курса, что приводит на волнении к появлению частых перекладок руля, на которые судно не успевает нужным образом реагировать из-за своей большой инерционности. В результате происходит трата энергии на неэффективную работу рулевого привода и ускоряет его износ. Во-вторых, из-за ограничения настройки авторулевые на судах в большинстве случаев работают в неоптимальном режиме, что вызывает рост (по сравнению с качественным регулированием) сопротивления движению судна вследствие больших углов дрейфа, перекладок руля, торможения судна инерционного происхождения.
Адаптивные рулевые
В 80-х годах появился новый тип авторулевого - адаптивный, имеющий автоматическую настройку параметров схемы при изменении внешних условий плавания или скорости судна. Это обеспечивает оптимальный режим работы системы без участия человека-оператора.
Адаптивные авторулевые используются главным образом на крупнотоннажных судах для улучшения их управляемости, особенно при движении с малой скоростью, на мелководье и в стеснённых условиях плавания.
Адаптивными называют авторулевые, которые самостоятельно меняют характер управляющих воздействий, приспосабливаясь к изменению внешних и внутренних условий работы системы для обеспечения высокого качества регулирования. Адаптивные системы разделяются на самонастраивающиеся, самоорганизующиеся и самообучающиеся.
Самонастраивающиеся системы - системы с параметрической адаптацией. Оптимальный режим работы в них обеспечивается за счет изменения коэффициентов закона регулирования, сам алгоритм регулирования остается неизменным.
В самоорганизующихся системах адаптация производится за счет изменения как вида закона управления (структурной схемы регулятора), так и коэффициентов этих законов. Самоорганизующиеся системы называются еще системами со структурной адаптацией.
Самообучающиеся системы при обеспечении наилучшего качества управления совершенствуют свою структуру на основе опыта функционирования. Это наиболее сложные, но в тоже время гибкие автоматические системы. Самонастраивающиеся и самоорганизующиеся системы можно рассматривать как частный случай самообучающиеся систем.
Автоматические бесконтактные авторулевые АБР и АР наиболее широко используются в настоящее время на транспортных судах. Принципиальные схемы этих приборов аналогичны. Авторулевые АБР предназначаются для установки на судах, находящихся в эксплуатации либо построенных за рубежом, тогда как авторулевой АР устанавливается на вновь строящихся отечественных судах. АР имеет комбинированный пульт управления, совмещающий в себе схемы автоматического, следящего и штатного ручного управления. Описания этих авторулевых даны в эксплуатационной документации, имеющейся на судах.
Авторулевой типизированного ряда АТР устанавливается только на судах новой постройки, оборудованных электрогидравлическими рулевыми машинами типизированного ряда.
В систему АТР входит пульт управления — основной прибор, с помощью которого производится управление судном в автоматическом, следящем и простом режимах, а также настройка системы в процессе эксплуатации.
Пульт следящего управления—прибор, с помощью которого производится управление судном при следящем и простом режимах работы. Он устанавливается в кормовом запасном посту управления судном.
Исполнительный механизм (ИМ-1), предназначенный для управления насосом переменной производительности, или ИМ-2 — управляющий золотниковым устройством насосного агрегата постоянной производительности. ИМ устанавливается в румпельном отделении. Рулевой датчик, механически связанный с баллером руля, вырабатывает сигналы внутренней отрицательной обратной связи.
Особенность системы АТР состоит в том, что она составляет единый комплекс с рулевой машиной типизированного ряда.
Вычислительная схема авторулевого АТР собрана на бесконтактных сельсинах типа БС-404А и имеет два полностью дублированных канала управления, что значительно повышает ее надежность.
В системе предусмотрены три режима управления: простой, следящий и автоматический. Следящее управление и ввод градусных поправок к заданному курсу осуществляются поворотом штурвала, а простое дистанционное управление — путем нажатия специальных клавиш.
В авторулевом предусмотрен автоматический возврат штурвала в нулевое положение при следящем режиме, что облегчает управление судном вручную.
При эксплуатации системы АТР в режимах «следящий» и «простой» рекомендуется запускать оба насоса рулевого привода, что увеличивает скорость перекладки руля и повышает надежность рулевого управления.
При работе в режиме «Автомат» следует периодически переключать систему с одного насоса на другой для равномерной эксплуатации оборудования.
Подробно устройство системы АТР дано в эксплуатационной документации, имеющейся на судне.
Автоматический малогабаритный рулевой АРМ-2 предназначен для установки на судах морского флота среднего и малого тоннажа, а также имеющих нестандартное рулевое устройство. Он может работать от курсоуказателей с дистанционной передачей показаний на частоте 50 и 500 гц.
Комплект авторулевого состоит из четырех основных приборов. Прибор № 1 включает в себя всю механическую схему авторулевого. Он выполняется в двух вариантах: с сельсинами БС-404А (АРМ-2—50) и с сельсинами СС-150 (АРМ-2—600). Устанавливается вместо путевого репитера гирокомпаса в рулевой рубке судна рядом со штатным постом управления рулем.
В приборе № 2 размещена схема формирования сигналов управления, необходимые устройства для настройки авторулевого, а также звуковая и световая сигнализация. Прибор устанавливается на переборке в рулевой рубке.
Прибор № 3 является датчиком сигнала обратной связи, пропорционального углу поворота руля.
Прибор № 4 представляет собой соединительную коробку, служащую для подключения прибора № 1 к схеме.
Если на судне установлен указатель положения руля типа ПК7/ПС или 845/ПС28, то для упрощения монтажа авторулевого взамен прибора № 3 может быть установлен прибор № 5, который выполняет те же функции, но устанавливается в рулевой рубке.
Авторулевой АРМ-2 может также использоваться на малотоннажных судах со штуртросовым рулевым устройством или с гидравлической системой управления рулевой машиной. В этом случае в комплект авторулевого добавляется специальный исполнительный механизм, состоящий из электродвигателя с редуктором и электромагнитной муфты. Выходной вал исполнительного механизма соединяется со штурвалом цепной передачей и включается автоматически при включении авторулевого.
Питание авторулевого осуществляется от преобразователя гирокомпаса. Электродвигатель исполнительного механизма работает на постоянном токе 110/220 в, потребляемая мощность, порядка 300 вт.
Наибольшие возможности для обеспечения оптимального управления судном имеют электронные цифровые АР. Общий вид одного из них CDP 3000DD/SS, его панели управления и дисплея рулевого приведен на рис. 5.1.
Рис. 5.1 - Общий вид электронного авторулевого CDP3000DD/SS.
Традиционные электромеханические авторулевые с ручной настройкой имеют следующие недостатки:
• устаревшая элементная база;
• малая защищенность от помех, вызываемых волнением;
• недостаточная чувствительность по угловой скорости в тихую погоду, особенно для теоретически неустойчивых на курсе судов;
• низкая эффективность ручной настройки, не обеспечивающая оптимального режима стабилизации курса и выполнения поворотов;
• отсутствие способов автоматического выполнения поворотов на любой угол требуемым образом;
• трудность включения в контур автоматического управления при плавании по заданной траектории.
Из-за некачественной работы АР с ручной настройкой потери в расходе топлива на крупнотоннажных судах могут достигать 3%, а на обычных судах - до 1%.
Авторулевым называют навигационный прибор для автоматического удержания морского судна на заданном курсе по сигналам с опорного гироскопического устройства. Чаще всего этот термин относят к морскому навигационному прибору, управляющие сигналы на который поступают с гирокомпаса. Самолетный гирорулевой обычно именуют автопилотом, потому что не все сигналы, поступающие на него, вырабатываются гироскопическими датчиками. В большинстве случаев гирорулевой держит судно на заданном курсе лучше человека, так как этот точный прибор не знает усталости.
Последовательность действий гирорулевого такова. Установленное на гирокомпасе контактное устройство подключает одну электрическую схему, когда судно отворачивает влево от курса, и другую, когда оно отклоняется вправо (см. рисунок 6.1). Сигнал с соответствующей схемы воздействует на двигатель рулевого механизма, и тот поворачивает руль судна в направлении, противодействующем появившемуся отклонению от курса.
 Рис. 6.1 - СХЕМА РАБОТЫ АВТОРУЛЕВОГО.
Рис. 6.1 - СХЕМА РАБОТЫ АВТОРУЛЕВОГО.
а - судно на заданном курсе; б - судно отклонилось вправо от курса; в - руль отклонился влево, чтобы вернуть судно на курс в соответствии с данными гирокомпаса. 1 - контактное устройство на компасе; 2 - фиксированный элемент (удерживается в заданной ориентации гирокомпасом); 3 - подвижный контакт; 4 - тяга; 5 - руль; 6 - включение схемы, управляющей поворотом руля; 7 - отключение схемы, управляющей поворотом руля.
Основные законы управления АР, Несмотря на различия применяемых на судах АР, основным их законом управления при автоматической стабилизации курса является пропорционально-дифференциально-интегральный (ПИЛ) закон, а при изменениях курса и при работе в системе управления движением на траектории -пропорционально-дифференциальный (ПД) закон управления.
Внешние датчики информации. Для выполнения своих задач АР используют информацию определенных датчиков. Количество датчиков, которые присоединяются к авторулевому, зависит от его функциональных возможностей.
Основную информацию для управления судном по курсу дают компасы, датчики угловой скорости рыскания, датчики положения руля.
Современные авторулевые обеспечивают подключение: гирокомпасов, магнитных компасов с дистанционной передачей показаний и флюксгейт компасов. Эти приборы должны удовлетворять современным требованиям к взаимодействию навигационной аппаратуры.
В качестве датчиков угловой скорости для авторулевых используются специальные дифференцирующие курс устройства, либо гироскопические датчики угловой скорости поворота.
Для решения задачи проводки судна по заданному маршруту в АР должна поступать информация, определяющая этот маршрут и
требования к его прохождению, а также информация о координатах
текущего места судна. Для обеспечения этой информацией к АР могут подключаться автоматизированные приемоиндикаторы позиционных систем (GPS, DGPS, ГЛОНАСС и др.), а также судовая навигационно-информационная система, ECDIS или ECS.
Для улучшения качества работы и выполнения адаптации к изменяющимся условиям АР могут использовать информацию: относительного и/или абсолютного лага, эхолота, гироскопических датчиков угловой скорости бортовой и килевой качки, датчика скорости и направления ветра, приемоиндикатора DGPS.
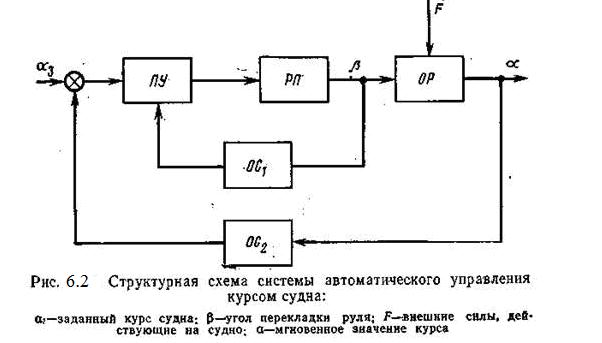
Все новые суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ.) курсом.
САУ курсом судна состоит из прибора управления, который обычно называется авторулевым (АР), рулевого привода (РМ) с управляющим органом — рулем, судна как объекта регулирования, а также внутренней (OC). Внешняя обратная связь (рис. 2) осуществляется через судно, на котором установлен гирокомпас (ГК).
Прибор управления системы представляет собой вычислительное устройство, построенное на электромеханических и электронных элементах и вырабатывающее сигналы управления, пропорциональные по величине углу и угловой скорости отклонения судна от заданного курса. В отечественных авторулевых, кроме того, имеется интегрирующее устройство, вырабатывающее сигнал, устраняющий снос судна при несимметричном рыскании.
На пульте управления авторулевого размещаются все необходимые органы настройки, контроля и управления системы.
На большинстве современных судов в качестве рулевого привода используются электрогидравлические рулевые машины, обеспечивающие перекладку руля со скоростью примерно 2,5—3 град/сек.
При одновременном включении насосов левого и правого бортов скорость перекладки руля увеличивается до 5 град/сек, что положительно влияет на управляемость судна, особенно на малом ходу.
Внутренняя обратная связь в системе осуществляется с помощью устройства, механически связанного с баллером руля и вырабатывающего электрический сигнал, пропорциональный углу поворота руля.
Внешняя обратная связь обеспечивается гирокомпасом, который преобразует изменение курса судна в угол поворота сельсина-датчика курса, связанного с сельсином-приемником в авторулевом.
Все существующие системы автоматического управления курсом судна, независимо от конструкции отдельных звеньев, работают по принципу отклонения, т.е. в авторулевом непрерывно сравниваются фактическое и заданное значения курса и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. Сигнал внутренней отрицательной обратной связи останавливает перекладку руля, а затем возвращает руль в среднее положение. Сигнал, пропорциональный скорости поворота судна, повышает чувствительность авторулевого при отклонении судна от заданного курса и обеспечивает сдерживание при возвращении на заданный курс.
Системы автоматического управления курсом удерживают судно на прямом заданном курсе в любую погоду при скорости хода более 5 узлов, а также позволяют изменять заданный курс при введении градусной поправки.
При правильной настройке авторулевой позволяет экономить до 3% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля; углы перекладки руля при автоматическом управлении на 20—30% меньше, чем при ручном.
В настоящее время много транспортных и рыболовных судов оборудовано отечественными авторулевыми типа Аист, а также широко используются авторулевые иностранного производства Anschutz (Германия), АРКАС (Дания) и др.
Современные авторулевые обеспечивают:
· автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при любой погоде (авторулевой не рассчитан на работу при движении судна на заднем ходу);
· управление рулевым приводом в зависимости от угла и скорости ухода судна с курса; автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и других причин;
· изменение курса судна при автоматическом управлении на любую величину; управление рулевым приводом вручную, пользуясь штурвалом следящего управления;
· изменение курса судна при помощи выносных постов управления в случае внезапного появления опасности.
Далее будет подробно рассмотрены назначение, конструкции и особенности эксплуатации современного авторулевого ANSCHUTZ NAUTOPILOT D (Германия).
Вопросы для самоконтроля.
1. Общее определение авторулевого.
2. Классификация авторулевых.
3. Чем отличается адаптивный авторулевой от неадаптивного.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 4566; Нарушение авторских прав?; Мы поможем в написании вашей работы!