КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движения
|
|
|
|
МЕХАНИЗМЫ ПРЕОБРАЗОВАНИЯ СИЛ И СКОРОСТЕЙ В АППАРАТЕ
Как следует из уравнения Хилла, каждая мышца способна развивать силу Р и скорость V в определенном диапазоне величин:
0 < P < Pm; 0 < V < Vm
Однако условия жизнедеятельности организма настолько многообразны, что таких значений может оказаться недостаточно. Для расширения этих диапазонов требуются механизмы, способные преобразовывать силы и скорости. Из механики известно, что простейшим механизмом подобного рода является рычаг - твердое недеформируемое тело, имеющее точку опоры (вращения).
|
В организме человека функцию рычагов выполняют кости скелета, которые имеют точки опоры (точнее говоря, ограниченные поверхности контакта) с материальными телами окружающей среды или с другими костями.
|
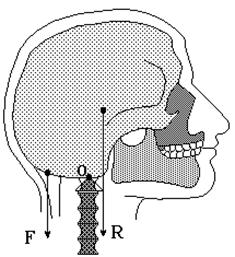
Принято различать рычаги первого и второго
Рис. 19 рода. Под рычагом первого рода понимают такой, у которого точка опоры расположена между линиями действующих сил (pис. 19).
Кратчайшее расстояние от точки опоры до линии действия соответствующей силы называется плечом. В дальнейшем будем обозначать силу, развиваемую мышцей, F, а ее плечо а; R- представляет собой нагрузку, против которой работает мышца, b - ее плечо. В качест- Рис. 20
ве нагрузок наиболее часто выступает сила тяжести отдельных структурных компонентов организма (головы, плеча, туловища и т. д.). В аппарате движения рычаги первого рода используются относительно редко. Типичным примером такого рычага может служить череп, имеющий точку опоры на первом позвонке (см. рис. 20). В данном случае вес черепа является нагрузкой, приложенной к центру тяжести черепа.
|
Линия действия этой силы располагается спереди от точки опоры. Сила мышцы, уравновешивающая нагрузку и обеспечивающая сохрание положения и движение черепа, располагается сзади от точки вращения. К рычагам второго рода относятся такие, у которых линии действующих сил находятся по одну сторону от точки опоры (см. рис.16). Эти рычаги очень широко представлены в опорно-двигательном аппарате. По сути дела, все элементы конечностей (кисть, предплечье, плечо, стопа, голень, бедро) являют
Рис. 21 ся рычагами второго рода.
|
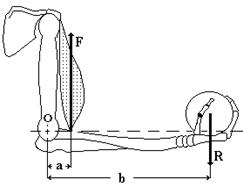
Под преобразователем скорости понимают рычаг (см. pис. 22), для которого плечо нагрузки больше плеча мышечной силы b > а. Если при сокращении мышцы рычаг равномерно поворачивается на угол Q за время t, угловая скорость вращения будет равна w = Q/t.
Линейная скорость движения каждой точки
Рис. 22 рычага выражается произведением угловой скорости на радиус поворота, которым в данном случае является расстояние от точки опоры до соответствующей точки рычага. Тогда для линейной скорости движения точек приложения мышечной силы и нагрузки будем иметь:
V1 = w a и V2 = w b
|
Отношение скорости движения точки приложения нагрузки к скорости точки приложения мышечной силы называется коэффициентом преобразования скорости:
k1 = V2 / V1 = w b / w a = b/a
При сокращении мышцы точка прикрепления ее к кости будет перемещаться с линейной скоростью V1, а точка действия силы нагрузки со скорость V2 = k1 ´V1. Поскольку k1 > 1, V2 > V1. Как показывает проведенный анализ, рассматриваемый рычаг увеличивает скорость Рис. 23
|
перемещения нагрузки V2 по отношению к скорости сокращения мышцы V1. Именно этот эффект имеют ввиду, когда говорят о рычаге преобразования скорости. На рисунке 23 представлена схема предплечья, как рычага преобразователя скорости. Так при а = 3 см, b = 30 см в данном случае k1 = 10.
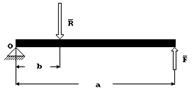
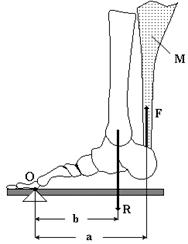
Рычаги - преобразователи сил позволяют уравновешивать большие нагрузки относительно малыми мышечными силами. Для таких рычагов плечо мышечной силы a > b. Как известно из физики, равновесие рычага наступает в том случае, если сумма моментов приложенных сил равна нулю. Для нашего случае это условие следует записать в виде: М1 = М2 (или aF = bR), где М1 = аF - момент мышечной силы, а М2 = bR - момент нагрузки. Рис. 24
Отношение величины нагрузки к силе мышечного сокращения называется коэффициентом преобразования сил. Как следует из приведенных выше соотношений,эта величина равна:
k2 = R/F = a/b
Мышечная сила будет уравновешивать тем большую нагрузку, чем больше соотношение а / b. На рисунке 24 представлена схема стопы как преобразователя мышечной силы.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 2073; Нарушение авторских прав?; Мы поможем в написании вашей работы!