КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индуктивные и магнитные датчики
|
|
|
|
Одним из основных достоинств магнитных датчиков перемещений является то, что магнитное поле может проникать через все немагнитные материалы без потери точности определения расстояния до объекта. Это означает, что какая не была преграда между датчиком и объектом: из нержавеющей стали, алюминия, латуни, меди, пластмассы, камня или дерева, расстояние между ними будет определено практически мгновенно. Другое достоинство магнитных датчиков заключается в том, что они могут работать в суровых условиях окружающей среды и им не страшна коррозия, поскольку и детекторы, и объекты при необходимости покрывают инертными материалами, не оказывающими никакого влияния на магнитные поля.
7.4.1 Линейно-регулируемые дифференциальные трансформаторы (ЛРДТ) и поворотно-регулируемые дифференциальные трансформаторы (ПРДТ)
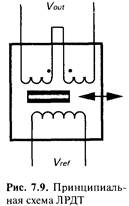
Некоторые датчики положения и перемещений используют принцип электромагнитной индукции. При движении объекта между двумя катушками меняется магнитный поток. Это изменение потока может быть преобразовано в напряжение. Индуктивные датчики, в которых для изменения сопротивления магнитного контура используются различные ферромагнитные материалы, называются преобразователями магнитного сопротивления [4]. Индукционный преобразователь, как правило, состоит из двух катушек: первичной и вторичной. На первичную катушку подается переменное опорное напряжение Vref индуцирующее переменное напряжение Vout во вторичной катушке (рис. 7.9). Амплитуда Vout зависит от величины потокосцепления между двумя катушками. Существует два способа изменения потокосцепления. Один из них — перемещение объекта, изготовленного из ферромагнитного материала, внутри магнитного контура. Это приводит к изменению магнитного сопротивления между катушками, что, в свою очередь, вызывает изменение потокосцепления. На этом принципе реализуются ЛРДТ, ПРДТ и индуктивные датчики приближения. Другой метод заключается в физическом перемещении одной катушки относительно другой.
ЛРДТ — это трансформатор с механически управляемым сердечником. На его первичную обмотку подается синусоидальное напряжение постоянной амплитуды. Применение синусоидального сигнала позволяет избавиться от паразитных гармоник [5]. На вторичных обмотках индуцируется переменное напряжение. В цилиндрическое отверстие между катушками вставляется сердечник из ферромагнитного материала. При этом сердечник не касается обмоток. Две вторичные обмотки включены в противофазе. Когда сердечник расположен в центре трансформатора, выходные сигналы вторичных катушек взаимно уничтожают друг друга, поэтому на выходе трансформатора нет никакого напряжения. Перемещение сердечника в сторону от центрального положения приводит к изменению магнитных потоков во вторичных обмотках. В результате возникшего разбаланса появляется выходное напряжение. Изменение магнитных потоков происходит за счет изменения магнитных сопротивлений пространства между катушками. Из всего вышесказанного следует, что величина потокосцепления определяется осевым положением сердечника. В линейной рабочей области в стационарном режиме амплитуда индуцированного сигнала пропорциональна смещению сердечника. Поэтому выходное напряжение может служить мерой перемещения. Выходной сигнал ЛРДТ не только показывает величину перемещения, но и его направление. Направление перемещения определяется фазовым углом между опорным и выходным напряжением. Опорное напряжение вырабатывается стабилизированным генератором.
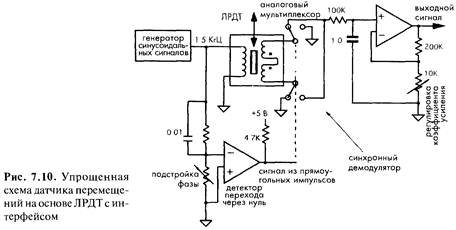
На рис. 7,10 показан ЛРДТ, соединенный с синхронным демодулятором, используемым для выпрямления синусоидального сигнала и представления его в виде выходного постоянного напряжения. Синхронный демодулятор состоит из аналогового мультиплексора и детектора пересечения нулевого уровня, преобразующего синусоидальный сигнал в прямоугольные импульсы, управляющие мультиплексором. Фаза сигнала детектора настраивается так, чтобы при нахождении сердечника в центральном положении выходное напряжение равнялось нулю. Выходной усилитель преобразует выходной сигнал к виду, совместимому с последующими схемами. Величина напряжения на выходе устройства соответствует расстоянию от сердечника до центральной точки, а его знак — направлению смещения. Для точного определения величины перемещений частота генератора должна быть, по крайней мере, на порядок выше максимальной частоты движения. При медленно меняющихся процессах стабилизированный генератор можно заменить подсоединением к сети, частота которой равна либо 60, либо 50 Гц.
ЛРДТ и ПРДТ обладают следующими достоинствами:
1. Датчики, реализованные на их основе, являются бесконтактными устройствами, с практически нулевыми потерями на трение.
2. Незначительным гистерезисом как магнитным, так и механическим.
3. Очень низким выходными импедансом.
4. Высокой помехоустойчивостью.
5. Прочной и надежной конструкцией.
6. Очень высокой разрешающей способностью.
Примером датчиков перемещений на основе ЛРДТ является так называемая измерительная головка, применяемая во многих видах тестового оборудования. В таких системах внутренний сердечник ЛРДТ подвешен на пружине, возвращающей измерительную головку в исходное положение.
ПРДТ работают на том же принципе, что и ЛРДТ, за исключением того, что в них используются вращающиеся сердечники. Основное применение ПРДТ — измерение угловых перемещений. Линейный диапазон измерений таких датчиков составляет порядка ±40° с погрешностью нелинейности около 1%.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 2474; Нарушение авторских прав?; Мы поможем в написании вашей работы!