КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамические характеристики элементов
|
|
|
|
| /^ |

| йХвых JL |
Изменения регулируемой величины во времени в результате того или
иного возмущающегося воздействия вызванных этим возмущением действия
регулятора называют процессом регулирования или переходным процессом
(динамический режим).
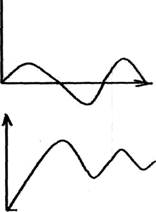
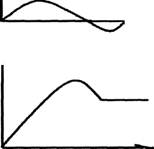
На рисунках представлены кривые переходных процессов вызванное как возмущением (А и Б, В, Г), так и изменением задания регулятору (Д и Е).
Пик выше пунктирной линии (точки задания) называется перерегулирование, на 20% выше задания (не больше).
График А - апериодически сходящиеся. Допустим, если Хмах < Хмах допустимого.
График Б - затухающий колебательный. Допустим: tp < tp допустимого.
График В - не затухающий колебательный. Допустим с малой амплитудой.
График Г расходящийся колебательный. Может быть допустим в системах автоматического регулирования (САР).
График Д - апериодически в результате управляющего воздействия.
График Е - колебательный в результате управления воздействия.
При изменении задания, отклонения отсчитывается от нового
установившегося значения, т.е. от оси абсцисс переносится в другую точку.
Если система в результате управляющего воздействия приходит к
равновесному состоянию, то она называется устойчивой (А, Б - графики).
В случае если регулируемая величина либо удаляется от значения заданного, либо совершает не затухающих колебаний - система не устойчива.
К САР представляются следующие требования:
1) Устойчивость;
2) Качество переходного процесса (минимальная статическая ошибка, minXmax, min tp)
Чем качественней система, тем она сложнее в реализации, поэтому при расчетах идут на компромисс между стремлением получить наиболее высокое качество регулирования и достичь решения задачи, возможно более простыми техническими средствами
Динамические свойства линейных элементов, а так же САР, часто описываются неоднородными, линейными, дифференциальными уравнениями.
Общий вид этих НЛДУ:

Динамические свойства не линейных элементов и систем описываются
дифференциальными уравнениями в частных производных и таких
уравнений представляющих еще большие трудности.
Поскольку большинство звеньев практически не линейные, для анализа их динамических свойств пользуются некоторыми искусственными приемами, заключающимися в следующем:
1) Не линейную характеристику; если это возможно подвергает линеаризации, т.е. криволинейный участок характеристики заменяют прямым.
2) Пользуясь преобразованием Лапласа сводят решение системы в сложным дифференциальных уравнений к системе алгебраических уравнений, решение которых не представляет трудностей.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 407; Нарушение авторских прав?; Мы поможем в написании вашей работы!