КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Назначение бустерного управления и требования к нему
|
|
|
|
Бустерное управление
Лекция 15
С ростом скорости полета и особенно при переходе к сверхзвуковым скоростям происходит перемещение центра давления рулевой поверхности. По этой причине шарнирные моменты рулей и элеронов с изменением скорости могут резко изменять свою величину, а в некоторых случаях даже и знак.
На таких самолетах для обеспечения нормальной управляемости в системах управления рулевыми поверхностями устанавливаются специальные усилители – бустеры.
К бустерному управлению предъявляются следующие основные требования:
1) сохранение у пилота чувства управления;
2) возможность управления самолетом в случае выхода из строя бустера, что обеспечивается переходом на непосредственное управление либо включением аварийной системы;
3) возвращение рулей в нейтральное положение при брошенных командных рычагах (обратимость управления);
4) следование руля за командным рычагом практически без запаздывания при скорости его отклонения, не превышающей величины, определяемой допустимыми перегрузками при маневре;
5) простота конструкции бустера, возможно меньшая его масса, надежность в эксплуатации, удобство подхода
к агрегатам бустера для осмотра и регламентных работ.
Силовой привод бустера располагается как можно ближе к рулевой поверхности, что уменьшает нагрузки и трение в проводке управления, а следовательно, позволяет уменьшить ее массу.
По способу создания усилия на командном рычаге бустерное управление можно разделить на две схемы: обратимую и необратимую.
При обратимой схеме бустерного управления усилие на командном рычаге пропорционально величине шарнирного момента рулевой поверхности. Здесь большая часть усилия, необходимого для отклонения руля, создается бустером, а небольшая его часть, составляющая постоянный процент от общего усилия, передается с командного рычага.
При необратимой схеме бустерного управления все усилие, необходимое для отклонения рулевой поверхности, создается бустером. Для обеспечения чувства управления усилие на командном рычаге при отклонении руля создается специальным загрузочным механизмом. Здесь усилие на командном рычаге уже не будет пропорционально величине шарнирного момента. Загрузочные механизмы обеспечивают также и обратимость – возвращают рули в нейтральное положение при брошенных командных рычагах.
На скоростных дозвуковых самолетах для получения допустимой (с точки зрения усилия на командном рычаге) величины шарнирного момента руля требуется настолько большая аэродинамическая компенсация, что может привести к перекомпенсации руля на некоторых углах его отклонения. Во избежание этого приходится уменьшать аэродинамическую компенсацию, а это приводит к увеличению усилий на командном рычаге.
Поэтому на таких самолетах целесообразно применять обратимую схему бустерного управления.
На сверхзвуковых самолетах, где при возникновении кризисных явлений происходит резкое изменение величин шарнирных моментов, а в некоторых случаях даже и изменение их знака, применяется необратимая схема бустерного управления.
Необратимая схема бустерного управления всегда применяется на сверхзвуковых самолетах с цельноуправляемым горизонтальным оперением. Ось вращения оперения для уменьшения величин шарнирных моментов размещают между центрами давления при дозвуковой и сверхзвуковой скорости. По этой причине шарнирный момент цельноуправляемого горизонтального оперения при переходе с дозвуковой к сверхзвуковой скорости меняет свой знак, что и делает невозможным применение обратимой схемы бустерного управления (из-за создания «неправильных» усилий на командном рычаге). Бустеры могут быть электрическими и гидравлическими. Более широкое применение получили гидравлические бустеры.
По типу силового привода различают гидравлические бустеры поступательного и вращательного действия. Значительно чаще применяются гидравлические бустеры поступательного действия.
Обратимая схема бустерного управления
Обратимая схема бустерного управления характеризуется так называемым коэффициентом усиления, который представляет собой отношение величины общего усилия, необходимого для отклонения рулевой поверхности, к величине усилия, передаваемого с командного рычага.
 Коэффициент усиления может создаваться тремя способами: механическим, гидравлическим и смешанным.
Коэффициент усиления может создаваться тремя способами: механическим, гидравлическим и смешанным.
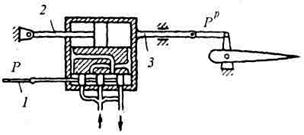
Рис.1 Рис.2
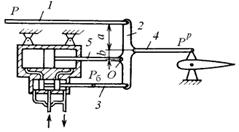
На рисунке 1 показана схема бустера, в котором коэффициент усиления создается механическим способом.
Бустер работает следующим образом. При перемещении тяги 1, связанной с командным рычагом управления, рычаг 2 поворачивается вокруг точки О и передвигает стержень 3, а следовательно, и шток золотника. Перемещение золотника открывает путь жидкости из магистрали нагнетания гидросистемы в бустер. Давление жидкости на поршень в бустере создает усилие в штоке 5, которое через рычаг 2 передается на тягу 4 и вызывает отклонение руля. Из другой полости бустера жидкость вытесняется через золотник в бачок гидросистемы.
Движение рычага 2 перемещает одновременно и золотник, который при прекращении перемещения тяги 1 занимает нейтральное положение, перекрывая подачу жидкости в бустер. Таким образом, отклонение руля всегда следует за перемещением тяги 1 и, следовательно, за отклонением командного рычага, с которым эта тяга связана.
При брошенном командном рычаге усилие в тяге 1 становится равным нулю, следовательно, рычаг 2 не будет уравновешен и под действием усилия в тяге 4 он отклонится, поворачиваясь вокруг шарнира О. Отклонение рычага 2 вызывает перемещение золотника, что приводит к подаче жидкости в бустер и перемещению его поршня.
Система уравновесится при нулевом усилии в тяге 4, т.е. тогда, когда шарнирный момент рулевой поверхности станет равным нулю.
Если усилие в тяге 1 обозначим Р, а усилие в тяге 4 – Р р, то коэффициент усиления i = Р р / Р.
Зависимость между усилиями Р и Р р получается из условий равновесия рычага 2. Если не учитывать сил трения, то эти условия запишутся в виде:
 и
и  , где Р б – усилие в штоке бустера 5. Отсюда:
, где Р б – усилие в штоке бустера 5. Отсюда: 
После подстановки значения Р р получим следующее выражение для коэффициента усиления: 
Таким образом, коэффициент усиления в этой схеме бустера при пренебрежении силами трения определяется только соотношением размеров плеч рычага 2.
Схема бустера, в котором коэффициент усиления создаётся гидравлическим способом, изображена на рисунке 2.
Этот бустер работает следующим образом. При передвижении тяги 1, связанной с командным рычагом управления, перемещается золотник, и жидкость из магистрали нагнетания начинает поступать в бустер. Давление жидкости на неподвижный поршень бустера 2 вызывает перемещение его корпуса и присоединенной к нему тяги 3 управления рулем. Из другой полости бустера жидкость через золотник идет в бачок гидросистемы. Движение корпуса бустера вызывает одновременное перемещение жестко соединенного с ним корпуса золотника, что при остановке движения тяги 1 приводит к прекращению подачи жидкости в бустер.
Таким образом, и здесь отклонение руля всегда следует за отклонением командного рычага. При брошенном командном рычаге и в этом бустере равновесие наступит тогда, когда шарнирный момент рулевой поверхности станет равным нулю.
Из схемы видно, что когда Р = 0, то золотник и бустер будут перемещаться до тех пор, пока не станет и Р р = 0.
Коэффициент усиления этого бустера:  . Условие равновесия бустера:
. Условие равновесия бустера:
Но так как:  , а
, а 
где р – давление жидкости в гидросистеме, а F б и F зол – площади поршней бустера и золотника, то:
 Тогда:
Тогда: 
Следовательно, если не учитывать сил трения, коэффициент усиления в этом бустере зависит от соотношения площадей поршней бустера и золотника.
 На рисунке 3 показана схема бустера, в котором коэффициент усиления создается смешанным способом,
На рисунке 3 показана схема бустера, в котором коэффициент усиления создается смешанным способом,
т. е. используются оба принципа, рассмотренные в предыдущих схемах.
Рис.3
При перемещении тяги 1, связанной с командным рычагом, рычаг 2 поворачивается вокруг точки О, перемещая золотник, вследствие чего жидкость из магистрали нагнетания начинает поступать в бустер. Давление жидкости на поршень бустера создает усилие в тяге 5, что приводит к отклонению руля. На тягу 5 передается также усилие тяги 4, которое получается в результате приложения нагрузки на рычаг 3 в точке О от рычага 2.
Как и в предыдущих схемах, при брошенном командном рычаге система уравновешивается тогда, когда шарнирный момент рулевой поверхности становится равным нулю.
В этой схеме коэффициент усиления бустера: . В результате её анализа получаем:
 . Тогда коэффициент усиления:
. Тогда коэффициент усиления: 
Таким образом, коэффициент усиления этого бустера при пренебрежении силами трения зависит от соотношения плеч рычагов и от соотношения площадей поршней бустера и золотника.
Необратимая схема бустерного управления
Бустеры этой схемы управления, в свою очередь, можно разделить на бустеры с обратной рычажной связью и бустеры простого действия.
Необратимая схема управления с бустером Необратимая схема управления
с обратной рычажной связью с бустером простого действия
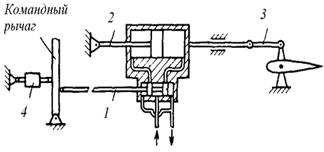
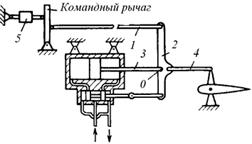
Рис.4 Рис.5
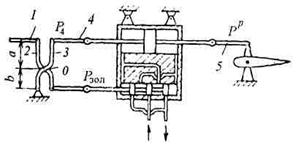
На схеме (рис.4) при перемещении тяги 1,связанной с командным рычагом, поворачивается рычаг 2 и передвигает золотник, что открывает доступ в бустер жидкости из магистрали нагнетания. Под давлением жидкости поршень бустера со штоком 3 и тяга 4 начинают перемещаться, отклоняя руль. При этом начинает двигаться рычаг 2, вызывая перемещение золотника, благодаря чему отклонение рулевой поверхности следует за перемещением тяги 1, а, следовательно, и за отклонением командного рычага, с которым эта тяга связана.
Усилие на командном рычаге, имитирующее чувство управления, создается загрузочным механизмом 5. При брошенном командном рычаге загрузочный механизм устанавливает в нейтральное положение тягу 1, что приводит к установке в нейтральное положение и рулевой поверхности.
На схеме (рис.5) перемещение тяги 1, связанной с командным рычагом, вызывает перемещение золотника, благодаря чему жидкость из магистрали нагнетания поступает в бустер. Давление жидкости на неподвижный поршень бустера 2 вызывает перемещение его корпуса и присоединенной к нему тяги З, что приводит к отклонению руля. Движение корпуса бустера вызывает перемещение жестко соединенного с ним корпуса золотника, чем и обеспечивается соответствие отклонения руля отклонению командного рычага.
Чувство управления обеспечивается загрузочным механизмом 4. Здесь так же, как и в предыдущей схеме, при брошенном командном рычаге загрузочный механизм устанавливает тягу 1 в нейтральное положение, что приводит к установке в нейтральное положение и рулевой поверхности.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 5316; Нарушение авторских прав?; Мы поможем в написании вашей работы!