КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 3. Жанровая характеристика ПР-текстов
.
2. Параллельное соединение – на входы всех звеньев подается один и тот же входной сигнал, а выходной сигнал цепи определяется как сумма выходных сигналов отдельных звеньев (рисунок 20).
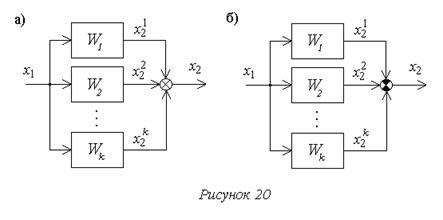
Получим выражение для передаточной функции параллельной цепи в соответствии с рисунком 20а:
 .
.
Отметим, что в общем случае при параллельном соединении сумма передаточных функций является алгебраической. Так для цепи на рисунке 20б имеет место:
 .
.
3. Отрицательная обратная связь (рисунок 21а).
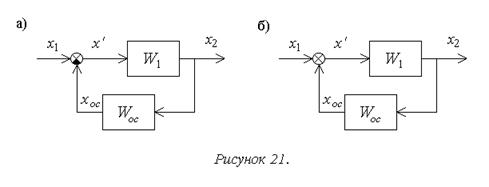
Составим уравнения в соответствии с рисунком:
X’=X 1 -Xос,
X 2= W 1 X’,
Xос=WосX 2.
Выразим из второго и третьего уравнений промежуточные сигналы через X 2и подставим в первое уравнение:
 .
.
После несложных преобразований получим правило для получения передаточной функции цепи с отрицательной обратной связью:
 ,
,
 ,
,
 .
.
4. Положительная обратная связь (рисунок 21б).
Соответствующие ей уравнения
X’=X 1 +Xос,
X 2= W 1 X’,
Xос=WосX 2;
отличаются от предыдущего случая только знаком при передаточной функции обратной связи. Как следствие, итоговое соотношение примет вид:
 .
.
Преобразование структурных схем
Рассмотренные типовые варианты не исчерпывают всего многообразия вариантов соединения звеньев на структурных схемах систем. Поэтому для решения практических задач часто требуется преобразование структурных схем, например, перенос сумматора через звено, перенос точки разветвления сигналов и др.
Рассмотрим фрагмент структурной схемы, показанный на рисунке 22. К нему невозможно прямо применить ни одно из рассмотренных правил.
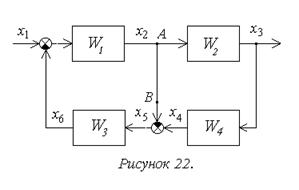
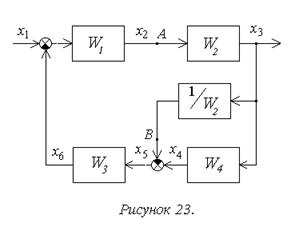
Для того, чтобы привести данную структуру к сочетанию участков типового соединения звеньев, необходимо ее преобразовать, например, поменять местами точку разветвления А и звено с передаточной функцией W 2. Такие преобразования возможны, если будут обеспечена эквивалентность выходных сигналов исходного и преобразованного участка схемы.
В исходной схеме сигнал x 2 поступает из точки А в точку В без изменений. После переноса точки разветвления через звено, он будет подвергаться преобразованию, описанному передаточной функцией W 2. Следовательно, необходимо дополнить структурную схему звеном, выполняющим обратное преобразование (рисунок 23). Приведенным рассуждениям соответствует равенство, подтверждающее требуемую эквивалентность:  .
.
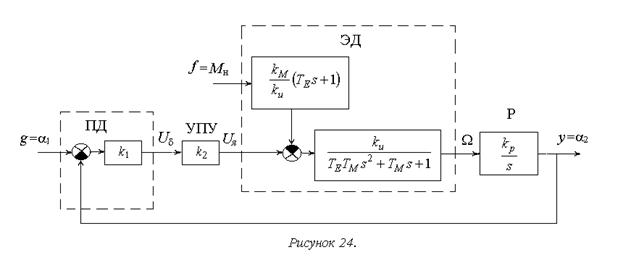
Вернемся к примеру следящей системы и упростим полученную структурную схему с учетом рассмотренных правил (рисунок 24).
Виды обратных связей
Обратные связи могут возникать на структурной схеме как отражение естественной взаимосвязи элементов системы или могут вводиться в процессе синтеза системы.
Обратные связи различаются по нескольким признакам:
1. Главная или местные обратные связи.
Главная обратная связь охватывает всю систему и служит реализации принципа управления в замкнутой системе.
Местные обратные связи охватывают отдельные фрагменты структуры системы и могут вводиться с целью повышения качества системы.
2. Положительная или отрицательная обратные связи.
Главная обратная связь всегда отрицательная.
3. Жесткая или гибкая обратные связи.
Жесткая обратная связь характеризуется передаточной функцией  . Жесткая единичная отрицательная обратная связь (kос =1) непосредственно реализует управление по ошибке: u (t)= kx (t)= k (g (t) – y (t)). Неединичная жесткая отрицательная обратная связь с kос< 1 может вводиться в качестве главной обратной связи с целью повышения точности системы.
. Жесткая единичная отрицательная обратная связь (kос =1) непосредственно реализует управление по ошибке: u (t)= kx (t)= k (g (t) – y (t)). Неединичная жесткая отрицательная обратная связь с kос< 1 может вводиться в качестве главной обратной связи с целью повышения точности системы.
Гибкая обратная связь обладает собственными динамическими свойствами и имеет более сложную передаточную функцию, содержащую оператор Лапласа.
Передаточные функции систем управления
В системах управления могут присутствовать несколько входных сигналов: одно или несколько задающих воздействий g, одно или несколько возмущающих воздействий f, причем разные входные сигналы могут поступать в различные точки системы.
В системе могут рассматриваться один или несколько выходных сигналов, также измеряемых в различных точках системы.
Даже если выходной сигнал y единственный, с целью анализа точности системы, наравне с ним рассматривается сигнал ошибки:  .
.
Таким образом, при описании замкнутой системы всегда приходится рассматривать несколько передаточных функций.
Сформулированное выше для динамических звеньев определение передаточной функции распространяется и на систему управления в целом, но в замкнутой системе существуют определённые правила выделения передаточных функций.
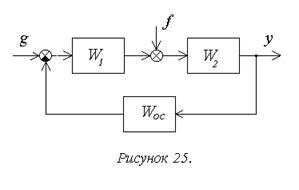
Виды передаточных функций, рассматриваемых для замкнутой системы, рассмотрим на основе структуры, представленной на рисунке 25.
Для задающего воздействия рассматривается следующий набор передаточных функций.
Передаточная функция разомкнутой системы – отношение изображений выходного сигнала и задающего воздействия без учета главной обратной связи:
 .
.
Для примера на рисунке 25 получим:  .
.
Любая передаточная функция в общем случае представляет собой отношение полиномов от аргумента s. Для передаточной функции разомкнутой системы используются условные обозначения этих полиномов:
 .
.
Основная передаточная функция замкнутой системы – отношение изображений выходного сигнала и задающего воздействия для системы в целом:
 .
.
Передаточная функция замкнутой системы по ошибке – отношение изображений сигнала ошибки и задающего воздействия:
 .
.
Отметим, что соотношение

получено только на основе определений передаточных функций и сигнала ошибки и справедливо для систем любой структуры.
Для системы с единичной отрицательной обратной связью получение передаточных функций значительно упрощается.
При  для основной передаточной функции получаем
для основной передаточной функции получаем
или через полиномы
 .
.
Для передаточной функции по ошибке:

или через полиномы
 .
.
Для возмущающего воздействия рассматривается аналогичный набор передаточных функций.
Передаточная функция разомкнутой системы по возмущению – отношение изображений выходного сигнала и возмущающего воздействия без учета главной обратной связи:
 .
.
На практике эта передаточная функция определяется как передаточная функция участка прямой цепи системы от точки приложения возмущающего воздействия до выхода системы.
Для примера на рисунке 25 получим:  .
.
Передаточная функция замкнутой системы по возмущению – отношение изображений выходного сигнала и возмущающего воздействия для системы в целом. При ее определении необходимо учитывать, что участок прямой цепи от входа системы до точки приложения возмущающего воздействия войдет для него в состав обратной связи (рисунок 26).
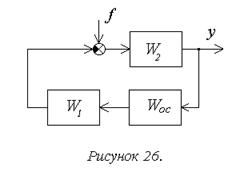
В результате получим:
 .
.
Передаточная функция замкнутой системы по ошибке от возмущающего воздействия – отношение изображений сигнала ошибки и возмущающего воздействия:
 ,
,
так как при определении передаточной функции по возмущению задающее воздействие должно быть принято равным нулю. Данное соотношение также является универсальным.
Теперь получим передаточные функции следящей системы (рисунок 24). Для приведения ее структуры в соответствие с рисунком 25 введем входной сигнал  - приведенное возмущающее воздействие (рисунок 27).
- приведенное возмущающее воздействие (рисунок 27).
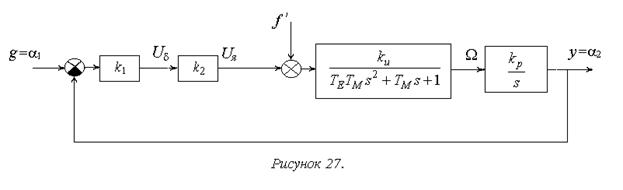
В соответствии с полученными выше соотношениями получим:
 ,
,
 - коэффициент передачи разомкнутой системы,
- коэффициент передачи разомкнутой системы,
 ,
,  ,
,
 ,
,
 ;
;
 ,
,
 - коэффициент передачи разомкнутой системы по возмущению f’,
- коэффициент передачи разомкнутой системы по возмущению f’,
 ,
,
 .
.
И для исходного возмущающего воздействия получим:
 ,
,
 - коэффициент передачи разомкнутой системы по возмущению f,
- коэффициент передачи разомкнутой системы по возмущению f,
 .
.
В заключение отметим два важных обстоятельства:
1. У всех передаточных функций замкнутой системы знаменатель одинаков. Его называют характеристическим полиномом системы и обозначают D (s).
2. Порядок числителя передаточных функций замкнутой системы не может быть выше порядка знаменателя (условие физической реализации). Порядок знаменателя n называют также порядком системы.
|
Дата добавления: 2014-01-20; Просмотров: 317; Нарушение авторских прав?; Мы поможем в написании вашей работы!