КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 2.1 Общие сведения об измерительных механизмах электромеханических приборов
|
|
|
|
Структурная схема, узлы и элементы аналоговых электромеханических приборов. Технические требования к приборам. Классификация электромеханических приборов. Условные обозначения, наносимые на шкалы электромеханических приборов. Классы точности приборов.
УЭ 2.1-1 Измерительный механизм имеет подвижную часть, на которую действуют механические силы, зависящие от измеряемой электрической величины.
Вращающий момент. Измерительные механизмы работают на принципе преобразования электромагнитной энергии в механическую энергию, воспринимаемую подвижной частью механизма. Механические силы и вращающий момент Мвр этих сил, действующий на подвижную часть механизма, возникают в результате взаимодействия магнитных или электрических полей, создаваемых током, напряжением, намагниченными или наэлектризованными телами.
Измерительные механизмы по принципу работы классифицируются:
| • | на магнитоэлектрические (в них вращающий момент создается путем взаимодействия магнитного поля постоянного магнита и контура (рамки) с током; подвижной частью может быть как рамка, так и магнит); |
| • | ферродинамические (вращающий момент в механизмах возникает в результате взаимодействия магнитного поля, создаваемого электромагнитом, и подвижного контура (рамки) с током); |
| • | электродинамические (вращающий момент в механизмах создается путем взаимодействия двух контуров (рамок) с током, один из которых — подвижный); |
| • | электромагнитные (в них вращающий момент создается благодаря действию магнитного поля неподвижной катушки на ферромагнитное тело, являющееся подвижной частью механизма); |
| • | электростатические (вращающий момент в механизмах возникает путем взаимодействия двух или нескольких заряженных тел, одно из которых является подвижной частью механизма); |
| • | индукционные (в них используются неподвижные контуры с переменным током, создающие переменные магнитные поля, индуктирующие токи в диске, являющемся подвижной частью механизма). |
Противодействующий момент. Для работы измерительного механизма необходимо, чтобы каждому значению измеряемой величины и вращающего момента соответствовал только один угол поворота подвижной части. Для этого в измерительном механизме предусмотрено создание противодействующего момента Мпр, направленного навстречу вращающему моменту и являющегося функцией угла отклонения.
Установившееся отклонение. При равенстве вращающего и противодействующего моментов будет иметь место установившееся отклонение.
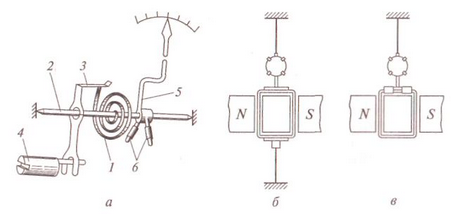
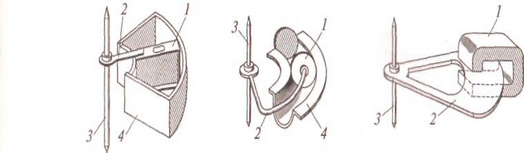
На рисунке 2.1 показано, что противодействующий момент обычно создается механическими силами с помощью спиральных пружин, растяжек или подвесов. Противодействующий момент Мпр, создаваемый закручиванием пружинок, растяжек и подвесов, пропорционален углу закручивания а поворота подвижной части:
 ,
,
где W— удельный противодействующий момент, зависящий от упругих свойств материала и геометрических размеров ленты (длины, ширины и толщины), из которой выполнена пружина.
Рисунок 2.1. Способы создания противодействующего момента:а — с помощью спиральных пружин; б — посредством растяжек; в — с помощью подвесов; 1 — спиральная пружина, создающая противодействующий момент; 2 — ось измерительной системы; 3 — рычаг для установки стрелки в нулевое положение; 4 — эксцентрик для поворота рычага 3 и 5 — стрелки; 6 — балансирующие противовесы;
В качестве материала для изготовления пружин, растяжек и подвесов обычно применяется бронза.
Отсчетные устройства показаны на рисунке 2.2.
Рисунок 2.2. Отсчетные устройства измерительных механизмов: а — обычная шкала и стрелка, имеющая копьевидный конец; б — зеркальная шкала и стрелка, содержащая ножевидный конец.
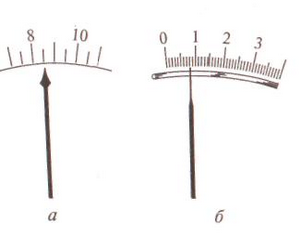
В измерительных механизмах в основном применяются три типа отсчетных устройств:
| • | обычная шкала и стрелка, имеющая копьевидный конец; |
| • | зеркальная шкала и стрелка, содержащая ножевидный конец; |
| • | световой отсчет с помощью зеркальца. |
На рисунке 2.3 показан прибор с внутренним световым отсчетным устройством.
Рисунок 2.3. Прибор с внутренним световым отсчетом: 1 — лампа; 2 и 6 — линзы; 3 — диафрагма; 4 и 5 — зеркала; 7 — зеркальце подвижной части; 8 и 9 — зеркала; 10 — шкала
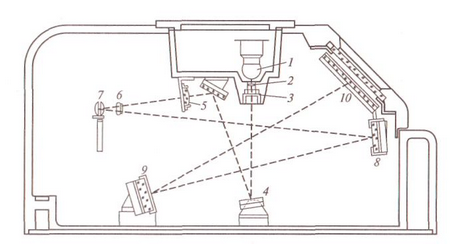
Луч света от лампы 1 через линзу 2, диафрагму 3, зеркал 4 и 5 и линзу 6 направлен на зеркальце 7 подвижной части, отразившись от которого, через зеркала 8 и 9 попадает на шкалу 10. На шкале получается изображение нити лампы в виде круглого светового пятна с чертой посередине. Многократное отражение позволяет удлинить расстояние от зеркальца до шкалы и получить значительно большее перемещение светового пятна по шкале.
Успокоители. Подвижная часть механизма представляет собой массу, соединенную с упругим элементом, т.е. является колебательной системой. Для успокоения колебательной подвижной системы предусмотрены успокоители (демпферы). В измерительных механизмах применяются воздушные и магнитоиндукционные успокоители показанные на рисунке 2.4.
Рисунок 2.4. Типы успокоителей: а — воздушный крыльчатый; 1 — алюминиевая пластинка; 2 — ножка; 3 — ось подвижной части; 4 — камера; б — воздушный поршневый; 1 — алюминиевая пластинка; 2 — ножка; 3 — ось подвижной части; 4 — камера; в — магнитоиндукционный; 1 — постоянный магнит; 2 — алюминиевая пластинка; 3 — осьподвижной части
Воздушные успокоители обычно выполняются в виде крыльчатых и поршневых успокоителей. Крыльчатые успокоители представляют собой алюминиевую пластинку 1, перемещающуюся в камере 4 и укрепленную на ножке 2, сидящей на оси 3 подвижной части. Зазоры между крылом и камерой малы (0,3... 0,5 мм), поэтому сопротивление воздуха в камере движения подвижной части велико. Аналогично работает и поршневый успокоитель.
Магнитоиндукционный успокоитель работает следующим образом: момент успокоения создается силами взаимодействия поля постоянного магнита 1 и токов, которые индуктируются в алюминиевой пластинке 2, перемещающейся в камере 4, закрепленной на оси 3 подвижной части, при ее движении в поле магнита.
УЭ 2.1-2 Классификация электромеханических электроизмерительных приборов выполнена в виде условных графических и буквенных обозначений и приведена в таблице 2.1.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 2015; Нарушение авторских прав?; Мы поможем в написании вашей работы!