КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод последовательного синтеза
|
|
|
|
Сущность метода последовательного синтеза сводится к следующему: исходную систему уравнений (1.24) представим в скалярном виде
 (1.32)
(1.32)
где yi — координаты системы; ui — управляющие воздействия, которые отыскиваются в виде ui=umaxsign σ; umax ≤uДОП. Пусть Lm — область управляемости для системы Ym. Тогда если синтезировано оптимальное по быстродействию управление для первого уравнения системы (1.32), а um(y1,y2,…,ym) и φkum(y1,y2,…,ym) (k=1,n) есть траектория, ведущая из области управляемости y1…ym (Dm) в начало координат, то оптимальное по быстродействию управление для системы (m+1) порядка с точностью до знака будет
 (1.33)
(1.33)
Управление (1.33) переводит в начало координат только те точки системы (1.32) из области Lm+1 которые подчинены условиям
 (1.34)
(1.34)
Соотношение (1.34) представляет собой уравнение поверхности переключения системы σ(y1,y2,…,ym+1) и позволяет строить достаточно полную сетку точек, лежащих на этой поверхности. Вычислительная процедура по построению управления (1.33) выполняется на ЭВМ. Процедура заключается в получении таблицы точек искомой функции σ(y1,y2,…,ym) с числом входов, на единицу меньшим, чем порядок рассматриваемой системы. Необходимым условием реализации вычислительной процедуры является решение на ЭВМ уравнений движения неизменяемой части системы (1.32).
Изложенный метод синтеза нелинейных управлений наряду с преимуществами — выполнением условий tп.п < tдоп, |U(t)|<<|U|доп — имеет ряд недостатков:
1) потребность в приведении исходной матрицы А в (1.24) к треугольной форме; эта операция для плохо обусловленных систем высокого порядка приводит к большим затратам машинного времени;
2) необходимость в реализации процедуры построения поверхности переключения, что связано с нарастанием погрешностей при увеличении размерности системы;
3) в функционале метода отсутствует учет внешних возмущений.
Дадим более общую постановку задачи синтеза с учетом возмущений и выведем управления, обеспечивающие одновременно оптимальность переходного процесса и инвариантность к внешним возмущениям.
Рассмотрим вновь систему (1.24), положив в ней D=E и заменив размерности n1=n3=n, m=n2. Тогда получим систему
 , (1.35)
, (1.35)
где Y(t) и X(t) — векторы параметров состояний и возмущений порядка n, непрерывные на промежутке [0, ∞]; для всех компонент вектора X(t) соблюдается условие N<|xi(t)|<.M, N и М — заданные константы; U — вектор-функция управлений порядка m; А и В —матрицы постоянных коэффициентов порядков (nxn) и(nxm) соответственно.
В (1.35) все матрицы и векторы вещественные; предполагается, что пара (А,В) управляема, т. е. среди столбцов матрицы ||В,АВ,…, Аn-1В|| есть n линейно независимых. В качестве функционала, обеспечивающего инвариантность системы (независимость от возмущений), принимается функционал вида
 , (1.36)
, (1.36)
где Р — матрица знакопеременных коэффициентов размера nxn;
 .
.
С помощью этой матрицы обеспечивается положительность подынтегральной функции (1.36); Rx — положительная диагональная матрица весовых коэффициентов порядка (mxm). Вектор Ux (порядка m) называется управлением по возмущению и является составляющим вектора общего управления U, причем U =U0+Ux. В случае |xi(t) | ≤N Ux=0.
Составляющая общего управления U0, обеспечивающая оптимальное демпфирование переходных процессов и синтезируемая по квадратичному критерию качества
 ,
,
определяется известным образом:
 , (1.37)
, (1.37)
где К — положительно-определенная симметричная матрица, которая отыскивается из решения уравнения Дж. Риккати (итальянский математик, 1676—1754)
 . (1.38)
. (1.38)
В этом уравнении Q, R— заданные положительно-определенные матрицы, вычисляемые в соответствии с критериями качества(1.8), (1.9); AT, ВT — транспонированные матрицы A, В.
Уравнение (1.38) решается путем численного интегрирования дифференциального уравнения  . Для определения Ux будем использовать классический метод Лагранжа, считая, что U0 уже найдено. В этом случае систему (1.33) можно записать в виде
. Для определения Ux будем использовать классический метод Лагранжа, считая, что U0 уже найдено. В этом случае систему (1.33) можно записать в виде
 , (1.39)
, (1.39)
где S = A-BR-1BTK — матрица Гурвица, т. е. матрица, собственные числа которой расположены в левой полуплоскости комплексной переменной p уравнения |pЕ-A|=0.
Для функционала (1.36) и системы (1.39) напишем функцию Гамильтона:
 , (1.40)
, (1.40)
где ψ — вектор-функция с элементами ψ1,ψ2,…,ψn причем ψ0=Е. Векторная функция ψ(t) удовлетворяет системе уравнений Эйлера- Лагранжа:
 . (1.41)
. (1.41)
Применяя к выражению (1.40) правило векторного дифференцирования, получим следующее векторное уравнение для функции ψ:
 . (1.42)
. (1.42)
Согласно условию стационарности функции H, можно записать
 . (1.43).
. (1.43).
Из уравнения (1.43), полагая, что матрица Rx невырожденная, получим
 . (1.44)
. (1.44)
В результате приходим к системе дифференциальных уравнений, из решения которой определяется искомая функция ψ:
 . (1.45)
. (1.45)
В аналитическом виде после решения уравнений (1.45) управление (1.44) можно представить в форме
 , (1.46)
, (1.46)
где матрица Р, являющаяся матрицей знакопеременных коэффициентов, вычисляется в процессе решения системы (1.45).
Таким образом, общий нелинейный закон управления можно представить в виде
 , (1.47)
, (1.47)
Согласно алгоритму машинного синтеза САУ (см. рис. 3), следующим этапом после определения структуры и начальных параметров регулятора является параметрическая оптимизация регулятора машинно-аналитическим методом, который включает в себя процедуры оптимального поиска.
Такие процедуры сводятся в общем случае к задачам нелинейного программирования. При применении известных методов нелинейного программирования, которые достаточно хорошо разработаны лишь для случаев выпуклого и, в частности, квадратичного программирования, оптимизация параметров САУ осложняется наличием дополнительных условий и ограничений, а в ряде случаев— необходимостью поиска экстремума.
Перечислим специфические свойства, присущие целевым функциям в процедурах поиска при оптимизации параметров САУ:
- характеристики качества, даже для линейных систем зависят от параметров поиска нелинейно;
- целевая функция — неявная функция своих аргументов, как правило, имеет локальные экстремумы, «гребни», «овраги» и т. д.
Отсюда следует невозможность выбора какого-либо одного метода поиска, «справляющегося» со всеми перечисленными особенностями целевых функций. Достаточно удобен поиск оптимальных параметров V, К при синтезе управлений U (рис. 3) в САУ на основе моделирования. В этом методе применяются два подхода: программный подход, когда исследователь по заранее составленной программе изменяет параметры V, К, «отслеживая» изменения показателя качества, и автоматический синтез с помощью оптимизатора, реализованного либо аппаратно, либо программно.
При наличии у исследователя определенного опыта и интуиции первый подход во многих случаях приводит к успеху при решении сложных задач. Естественно, что при этом должна быть достаточно совершенной методика моделирования.
Остановимся подробнее на втором подходе в случае аппаратной реализации алгоритмов оптимизации на АЦК, в составе которых имеются специальные «оптимизаторы». Принцип действия такого оптимизатора следует из рис. 4. В оптимизаторе аппаратно средствами аналого-цифровой техники реализуется один из критериев качества:

Исходная система уравнений (3.10) Y’=F(Y, X, U, Δ, t) решается многократно. В период времени между «пуском» и «остановкой» АВМ производится решение системы (3.10) при фиксированном варианте изменяемых параметров: V(k), K(k).
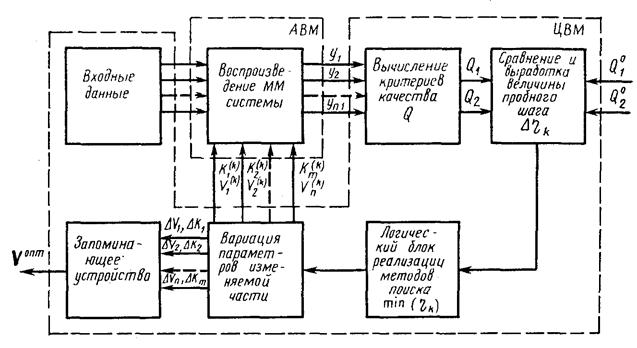
Рис. 4. Схема работы «оптимизатора» на АЦК
В период между «остановкой» и «возвратом к исходному положению» производится вычисление основных и дополнительных критериев качества и их отклонений от желаемых (установленных на оптимизаторе) значений Q10, Q20:
 ,
,
где КM — задаваемый масштаб.
Вычисляется шаг поиска минимума величины
где ai, a2j — весовые коэффициенты.
В период между «возвратом к исходному положению» и новым «пуском» осуществляется изменение
 .
.
При этом очередные значения V(k), K(k) фиксируются в запоминающем устройстве и по окончании поиска, когда
выдаются в виде конечного результата.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 517; Нарушение авторских прав?; Мы поможем в написании вашей работы!