КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Волновые механические передачи
|
|
|
|
Волновая передача основана на принципе преобразования параметров движения за счет волнового деформирования одного из звеньев механизма. Этот принцип преобразования движения впервые был предложен Москвитиным в 1944г. для варианта фрикционной передачи с электромагнитным генератором волн (см.ниже) и затем Массером в 1959г. для зубчатой передачи с механическим генератором.
Обладая рядом положительных качеств, волновая передача получила широкое распространение.
|
Основные распространения получают зубчатые передачи как наиболее эффективные. Однако изучение принципа действия передачи целесообразно начать с ее фрикционного варианта как наиболее простого.
Рис.11.1
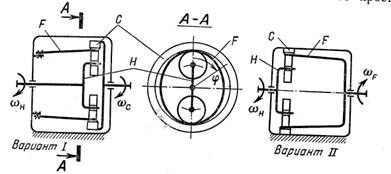
Схема волновой передачи представлена на рис.11.1. передача состоит из трех основных элементов: F – гибкое колесо; С – жесткое колесо; Н – волновой генератор. Наружный диаметр гибкого колеса dF меньше внутреннего диаметра жесткого колеса dС.
dС – dF = 2w0 (11.1)
В конструкциях на рис.11.1 гибкое колесо выполнено в виде кольца, переходящего в гибкий цилиндр. В передаче по варианту I с ведомым валом соединено жесткое колесо С, по варианту II – гибкое колесо F. В варианте I левый недеформированный конец гибкого цилиндра жестко присоединен к корпусу. С правого конца в цилиндр вставлен генератор Н, который представляет собой водило с двумя роликами. Наружный размер по роликам больше внутреннего диаметра цилиндра на 2W0. Поэтому с правого конца цилиндр деформирован. Генератор устроен так, чтобы деформированное гибкое колесо прижималось к внутренней цилиндрической поверхности жесткого колеса с силой достаточной для передачи нагрузки за счет сил трения.
На рис.11.2 изображен график радиальных перемещений W различных точек гибкого цилиндра, вызванных его деформированием. За координату по оси
| абсцисс принят угол j (см.рис.11.1). перемещения отсчитываем от начального положения точки на недеформированном цилиндре. График изображает некоторую волновую функцию. При вращении генератора волна перемещений бежит по окружности гибкого колеса. |
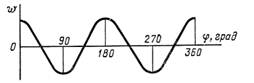 Рис.11.2
Рис.11.2
|
Поэтому передачу назвали волновой, а водило Н – волновым генератором.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 522; Нарушение авторских прав?; Мы поможем в написании вашей работы!