КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные виды механизмов
|
|
|
|
Классификация кинематических пар
1.2.1. Условия существования кинематических пар
Кинематические пары (КП) во многом определяют работоспособность машины, поскольку через них передаются усилия от одного звена к другому. Вследствие трения элементы пары находятся в напряженном состоянии и подвергаются износу. Поэтому при проектировании механизма большое значение имеет правильный выбор вида кинематической пары, её геометрической формы, размеров, конструкционных материалов и смазки.
Необходимы три условия для существования кинематической пары:
- наличие двух звеньев;
- возможность их относительного перемещения;
- постоянное соприкосновение этих звеньев.
С целью облегчения правильного выбора кинематической пары их классифицируют в зависимости от числа условий связи, по роду относительного движения звеньев, по характеру соприкосновения элементов кинематических пар и способу замыкания пары.
1.2.2. Классификация кинематических пар
в зависимости от числа условий связи
Твердое тело, свободно движущееся в пространстве, имеет 6 степеней свободы. Его возможные движения могут быть представлены как вращение вокруг трёх осей координат и поступательное движение вдоль этих же осей (рис. 3).
Рис. 3. Число степеней свободы любого тела в пространстве

Примеры кинематических пар различных классов
Звенья, соединённые кинематическими парами, получают в той или иной степени ограничения в их относительном движении.
Ограничения, накладываемые на независимые движения звеньев, образующих кинематическую пару, называются условиями связи S.
Н = 6 – S,
где Н – число степеней свободы звеньев;
S – число условий связей.
|
|
|
Если звено не входит в кинематическую пару, т. е. не связано с другим звеном, то у него нет ограничений движению: S = 0.
Если на материальные тела наложить 6 условий связи, они потеряют взаимную подвижность и получится жесткое соединение, т. е. кинематической пары не станет: S = 6.
Таким образом, число условий связи, наложенных на относительное движение каждого звена, может изменяться от 1 до 5.
Число условий связи кинематической пары определяет её класс (рис. 4).
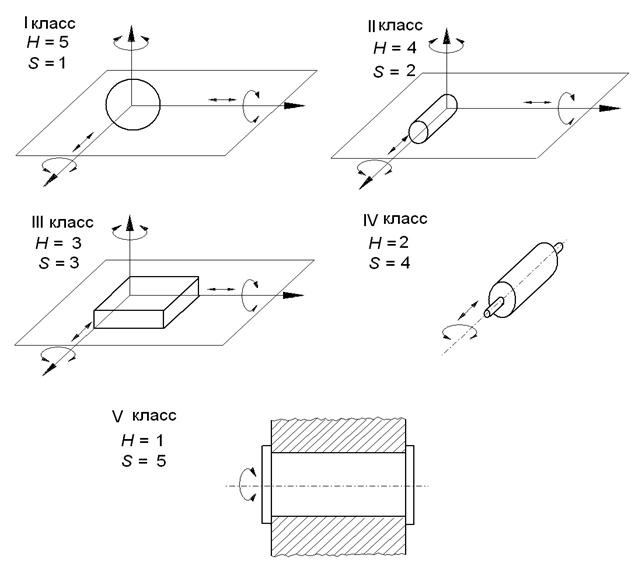 Рис. 4. Классы кинематических пар
Рис. 4. Классы кинематических пар
1.2.3. Классификация кинематических пар
по роду относительного движения звеньев
По роду относительного движения звеньев различают кинематические пары:
- поступательные;
- вращательные;
- винтовые.
Если одно звено движется относительно другого поступательно, то такая пара называется поступательной. На схеме поступательные пары могут изображаться следующим образом:

Если звенья, образующие пару, вращаются относительно друг друга, то такая кинематическая пара называется вращательной, и изображается она так:

Условное обозначение винтовой кинематической пары на схеме следующее:

1.2.4. Классификация кинематических пар
по характеру соприкосновения элементов пары
По характеру соприкосновения элементов кинематических пар различают пары низшие и высшие.
Низшиекинематическиепары –пары, в которых элементы касаются друг друга по поверхностям конечных размеров.
К ним относятся: поступательная (рис. 5), вращательная (рис. 6) и винтовая (рис. 7) пары. Низшие пары обратимы, т. е. характер движения не изменяется в зависимости от того, какое звено, входящее в пару, закреплено.
 на вращательные
на вращательные
|
поступательные
цилиндрические
|
сферические.

Рис. 5. Поступательная кинематическая пара
 Рис. 6. Вращательная кинематическая пара
Рис. 6. Вращательная кинематическая пара
| 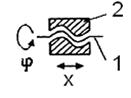 Рис. 7. Винтовая кинематическая пара
Рис. 7. Винтовая кинематическая пара
|
|
|
|
Высшие кинематические пары – это пары, элементы которых касаются друг друга по линии или в точке (рис. 8).
а) 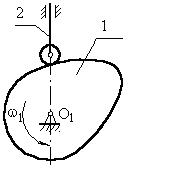 б)
б) 
Рис. 8. Механизмы с высшей кинематической парой:
а) контакт по линии или в точке (кулачок с толкателем);
б) два зуба контактируют по линии (зубчатое зацепление)
Высшие пары необратимы. Точки контакта описывают различные кривые в зависимости от того, какое звено, входящее в пару, закреплено.
1.2.5. Классификация кинематических пар по способу замыкания
По способу замыкания (обеспечения контакта звеньев пары) различают кинематические пары с силовым и геометрическим замыканиями.
Силовое замыкание происходит за счёт действия сил веса или силы упругости пружины (рис. 9); геометрическое– за счёт конструкции рабочих поверхностей пары (рис. 10).
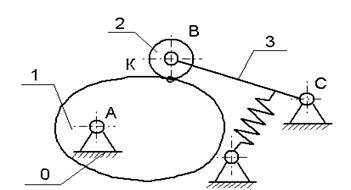
Рис. 9. Силовое замыкание кинематической пары
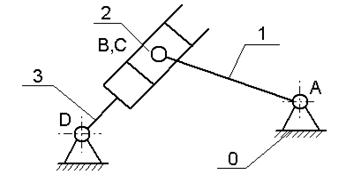
Рис. 10. Геометрическое замыкание кинематической пары
Принята следующая классификация механизмов:
а) по виду преобразования движения:
- редукторы (угловая скорость ведущего звена больше угловой скорости ведомого звена);
- мультипликаторы (угловая скорость ведущего звена меньше угловой скорости ведомого звена);
- муфты (угловая скорость ведущего звена равна угловой скорости ведомого звена).
б) по движению и расположению звеньев в пространстве:
- пространственные (все звенья движутся в разных, непараллельных плоскостях);
- плоские (все звенья движутся в одной плоскости).
в) по числу степеней подвижности механизма:
- с одной степенью подвижности;
- с несколькими степенями подвижности (интегральные – суммирующие, дифференциальные – разделяющие).
г) по виду кинематических пар:
- с низшими кинематическими парами (все кинематические пары механизма – низшие);
- с высшими кинематическими парами (хотя бы одна кинематическая пара – высшая).
д) по способу передачи и преобразования движения:
- фрикционные (сцепления);
- с зацеплением;
- волновые (создание волновой деформации).
е) по конструктивному исполнению и движению звеньев:
- рычажные;
- зубчатые;
- кулачковые;
- планетарные.
|
|
|
Дата добавления: 2014-01-20; Просмотров: 772; Нарушение авторских прав?; Мы поможем в написании вашей работы!