КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
В рисунках и графиках
|
|
|
|
Механизмы электрических аппаратов
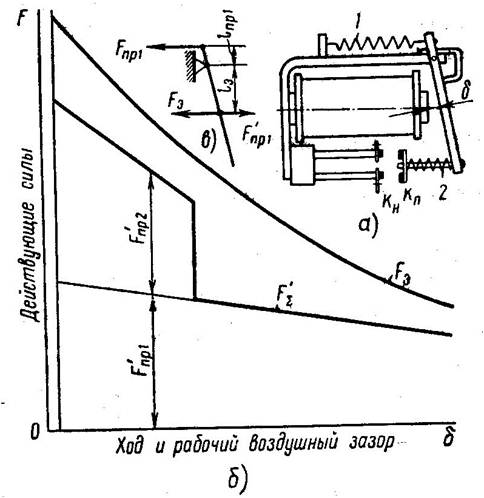
Рисунок 3.1 - Электромагнитное реле, имеющее замыкающие коммутирующую цепь контакты – а; статистическая характеристика сил его электромагнитно-пружинного механизма - б; кинематическая схема реле при замкнутых контактах и якоре – в
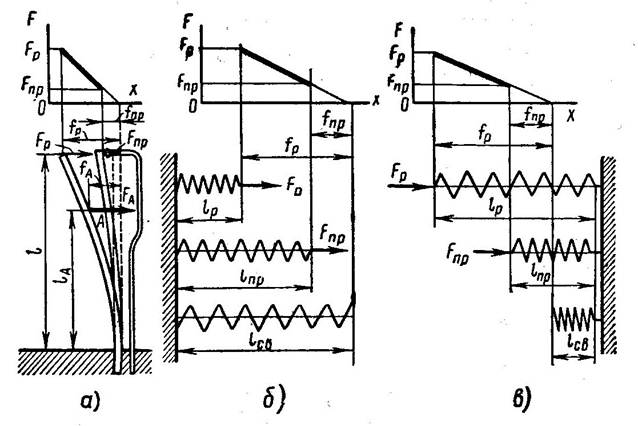
Рисунок 3. 2 - Характеристики пружин
а – плоской; б – цилиндрической сжатия; в – цилиндрической растяжения;
Х – ход механизма; отсчитывается от положения, при котором пружина развивает наибольшее усилие; f – прогиб пружины; отсчитывается в противоположном ходу направлении; F – сила, развиваемая пружиной, равная силе, деформирующей пружину, l – длина пружины.
Индексы у буквенных обозначений: пр – предварительное напряжение; р – рабочее состояние; св – свободное состояние пружины
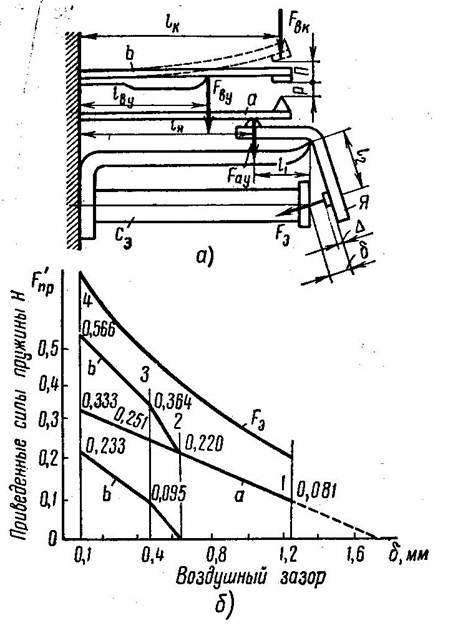
Рисунок 3.3 - Электромагнитно-пружинный механизм:
а – кинематическая схема; б – характеристики движущих сил;
а, в – пружины контактов; СЭ – сердечник электромагнита (без катушки); я – якорь электромагнита; ∆ - толщина диамагнитной прокладки, обеспечивающей отпадение якоря после отключения катушки от источника питания; Р, П – раствор и провал контакта; FЭ – электромагнитная сила
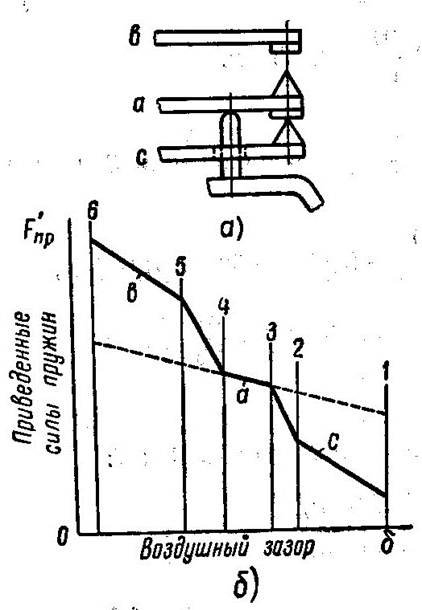
Рисунок 3.4 - Изменения в электромагнитно-пружинном механизме (рисунок 3.3) при наличии дополнительной пружины с, размыкающего цепь контакта:
а – измененная часть механизма;
б – характеристика движущих сил пружин
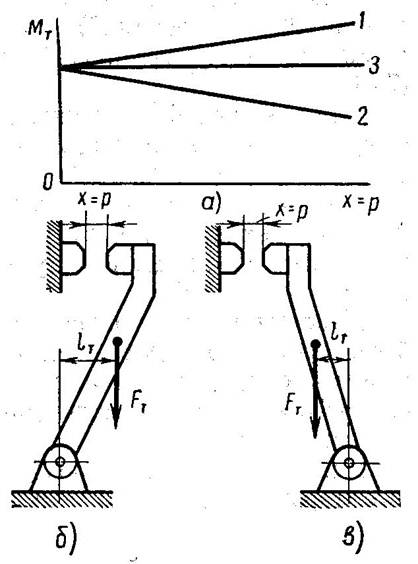
Рисунок 3.5 - Зависимость величины силы тяжести
подвижной части механизма аппарата от его хода:
а – характеристика движущего момента силы тяжести, б, в – схемы механизмов, у которых значение момента силы тяжести снижается и повышается при уменьшении раствора контактов р = х (провал контактов не показан с целью упрощения схемы)
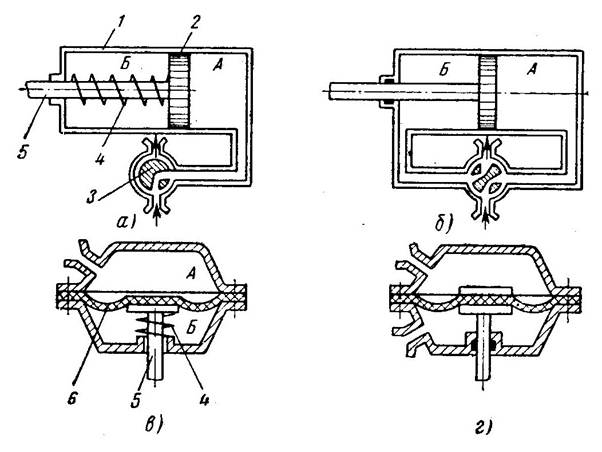
Рисунок 3.6 - Пневматические приводные механизмы
а, б – поршневые одностороннего и двустороннего действия;
в, г – диафрагменные одностороннего и двустороннего действия;
А, Б – полости пневмомеханизмов: 1 – цилиндр,
2 – поршень, 3 – воздухорспределительный кран (клапан),
4 – пружина, 5 – шток, 6 - диафрагма
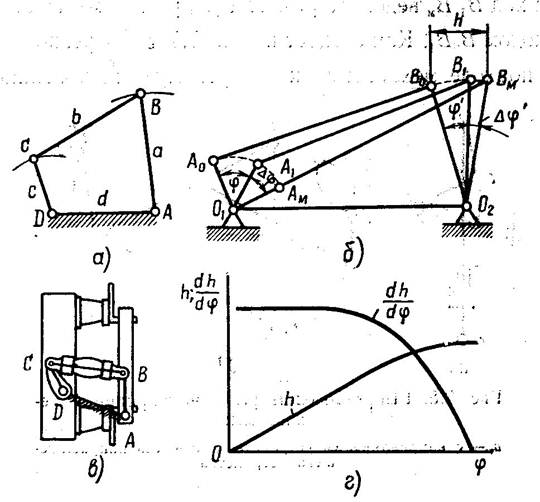
Рисунок 3. 7 - Четырехзвенный рычажно-шарнирный механизм:
а – структурная схема; б – перемещение четырехзвенника в мертвое положение; в – разъединитель высокого напряжения; г – кинематические характеристики перемещений при подходе механизма к его мертвому положению
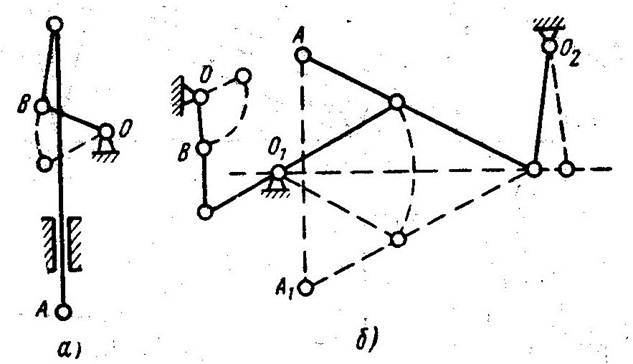
Рисунок 3.8 - Выпрямляющие рычажно-шарнирные механизмы:
а – с направляющим устройством; б – без направляющего устройства
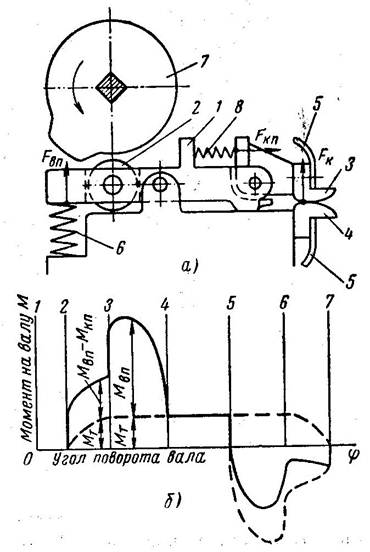
Рисунок 3.9 - Кулачковый передаточный механизм с контактным исполнительным механизмом - а; зависимость суммарного момента сопротивления движению, создаваемого включающей и контактной пружинами кулачкового контактного механизма - б
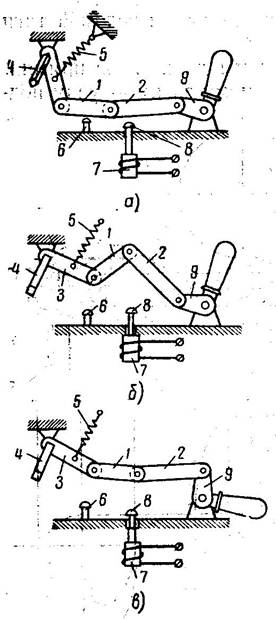
Рисунок 3.10 - Схема простейшего механизма свободного расцепления в трех положениях механизма:
а – включен; б – отключен; в – подготовлен к включению
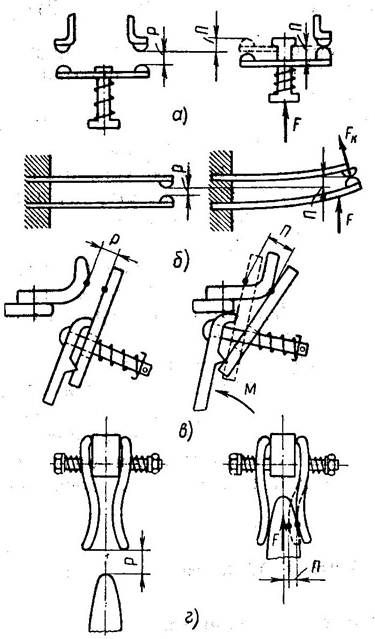
Рисунок 3.11 - Коммутирующие контакты:
а – мостиковый (без проскальзывания и перекатывания);
б – с плоскими консольными пружинами (с проскальзыванием);
в – с пальцеобразным подвижным контактом (с проскальзыванием и перекатыванием); г – клинообразный с пальцеобразным контактами (со скольжением контактов)
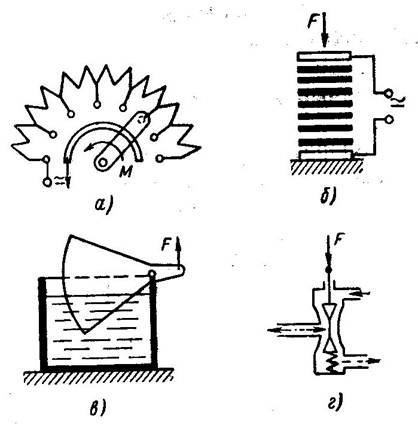
Рисунок 3.12 - исполнительные механизмы реостата и
электропневматических клапанов:
а – многоступенчатое коммутирующее устройство проволочного реостата; б – пакет угольных шайб угольного реостата;
в – погружаемый электрод жидкостного реостата; г – переключающий электропневматический клапан
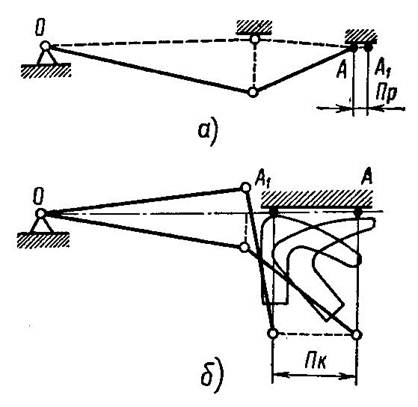
Рисунок 3.13 - Структурные схемы контактных механизмов:
а – с проскальзыванием подвижного контакта;
б – с перекрыванием подвижного контакта
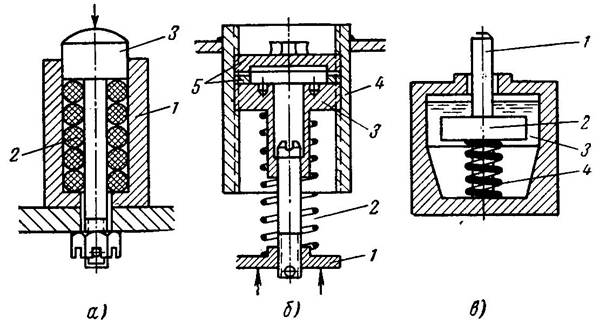
Рисунок 3.14 - Буферно-противоударные механизмы:
а – эластичный (резиновый); б – пружинный;
в – масляный (постоянного давления)
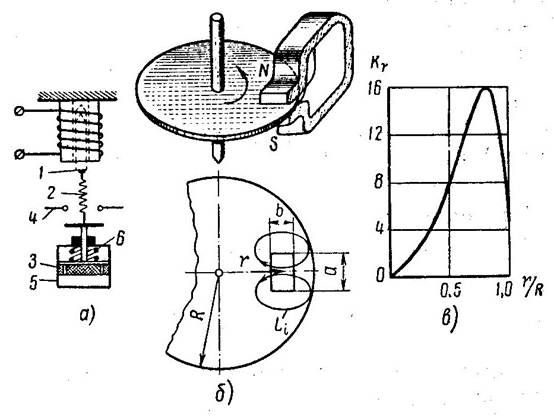
Рисунок 3.15 - Механизмы, создающие выдержку времени:
а – масляный демпфер (успокоитель);
б – индукционный демпфер (успокоитель);
в – значения коэффициента 
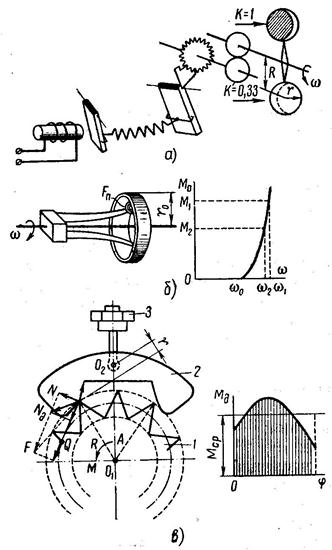
Рисунок 3.16 - Механизмы, создающие выдержку времени:
а – воздушный крыльчатый успокоитель;
б – центробежный тормоз; в – анкерный механизм
Литература
1. Буль Б.К. и др. Основы теории электрических аппаратов. Под ред. Г.В. Буткевича. Учеб. пособие для электротехнических специальностей вузов. М.: 1970. – 600 с. с илл.
ПГТУ, ул. Университетская,7
з. т.100
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 860; Нарушение авторских прав?; Мы поможем в написании вашей работы!