КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структурные группы для плоских рычажных механизмов
|
|
|
|
Классификация механизмов
Количество типов и видов механизмов исчисляется тысячами, поэтому классификация их необходима для выбора того или иного механизма из большого ряда существующих, а также для проведения синтеза механизма.
Универсальной классификации нет, но наиболее распространены 3 вида классификации:
1) функциональная; По принципу выполнения технологического процесса механизмы делятся на механизмы: приведения в движение режущего инструмента; питания, загрузки, съёма детали; транспортирования и т.д.;
2) структурно-конструктивная; Предусматривает разделение механизмов как по конструктивным особенностям, так и по структурным принципам. К этому виду относят механизмы: кривошипно-ползунный; кулисный; рычажно-зубчатый; кулачково-рычажный и т.д.;
3) структурная; Проста, рациональна, тесно связана с образованием механизма, его строением, методами кинематического и силового анализа, была предложена Л.В. Ассуром в 1916 году и основана на принципе построения механизма путем наслоения (присоединения) кинематических цепей (в виде структурных групп) к начальному механизму. Согласно этой классификации, любой механизм можно получить из более простого присоединением к последнему кинематических цепей с числом степеней свободы W = 0, получивших название структурных групп, или групп Ассура. Недостаток классификации – неудобство для выбора механизма с требуемыми свойствами.
Условие существования любой структурной группы описывается формулой
W = 3n – 2P5 = 0.
Так как количество звеньев n и количество кинематических пар P5 – целые числа, то
 – кратно 2, то есть чётно,
– кратно 2, то есть чётно,
 – кратно 3.
– кратно 3.
Все структурные группы принято разделять на классы – со 2-го по 4-й.
Примеры структурных групп и начального механизма приведены на рис. 1.4.
Двухповодковая структурная группа 2-го кл.
Структурная группа 2-го кл.
Структурная группа 3-го кл.
Структурная группа 4-го кл.
Механизм 1-го кл. (начальный механизм)
Рис. 1.4. Примеры структурных групп
При добавлении к механизму 1-го класса различных структурных групп можно получить механизм, состоящий из одной или нескольких структурных групп и механизма 1-го класса.
Механизмам присваивается определённый класс, соответствующий наивысшему классу входящих в него структурных групп. Примеры механизмов различных классов приведены на рис. 1.5.
|
2-й кл. 3-й кл. 4-й кл.
Рис. 1.5. Механизмы различных классов
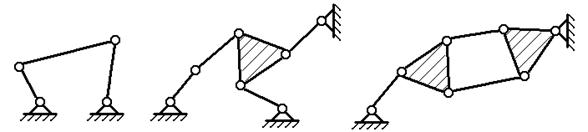
Порядок структурной группы равен числу свободных кинематических пар, которыми группа присоединяется к более простому механизму. Свободные пары показаны стрелками (рис. 1.6).
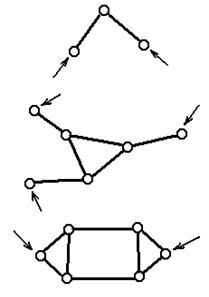
Структурная группа 2-го кл., 2-го порядка
(все структурные группы 2-го кл. имеют 2-й порядок)
Структурная группа 3-го кл., 3-го порядка
Структурная группа 4-го кл., 2-го порядка
Рис. 1.6. Примеры структурных групп различных классов
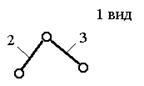
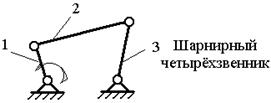
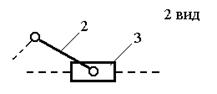
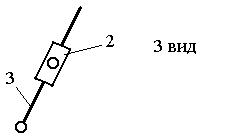
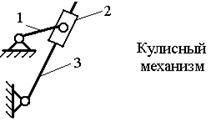
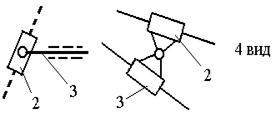
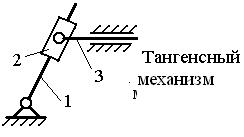
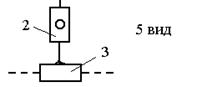
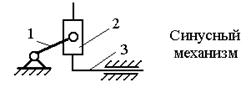
Наиболее распространённые структурные группы 2-го класса подразделяются на 5 видов (модификаций) (табл.).
| Кинематическая схема структурной группы, вид | Механизм, содержащий такую структурную группу |
| 
|
| 
|
| 
|
| 
|
| 
|
Примечание. 1 – ведущее звено; 2 и 3 – звенья, образующие структурную группу.
Для определения класса механизма его расчленяют на структурные группы, начиная с конца механизма. За начало механизма принимают ведущее звено (начальный механизм).
От конца механизма отделяются поочерёдно простейшие структурные группы до тех пор, пока не останется лишь механизм 1-го класса (начальный механизм, их может быть несколько).
По классу структурных групп определяют класс механизма. Количество начальных механизмов равно величине W.
Пример расчленения плоского рычажного механизма на структурные группы показан на рис. 1.7. Предварительно вычисляют степень подвижности механизма W по формуле
W = 3n – 2P5 – P4.
В данном случае W = 1, а это значит, что в механизме должны быть одно ведущее звено и соответственно один начальный механизм.

а б в г
Рис. 1.7. Расчленение механизма на структурные группы:
а – исходный механизм; б – начальный механизм;
в – 2-й класс, 1-й вид; г – 2-й класс, 2-й вид
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 451; Нарушение авторских прав?; Мы поможем в написании вашей работы!