КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы со сложной структурой
|
|
|
|
Системы, для которых качественный (структурный) анализ расчётной схемы не может быть полностью выполнен с использованием только типовых способов (приёмов) геометрически неизменяемого соединения дисков, называются с и с т е м а м и с о с л о ж н о й с т р у к т у р о й.
К таким системам относится сооружение, изображённое на рис. 1.44.
Для выполнения качественного анализа систем со сложной структурой могут применяться:
1) непосредственное исследование кинематической природы связей (описание дано выше);
2) способ замены связей;
3) аналитический признак геометрической неизменяемости системы.
При реализации первого подхода, как правило, не требуется анализировать все связи системы – достаточно оценить некоторые из них (а при W = 0 – возможно, даже одну). Например, в системе, представленной на рис. 1.44, в силу того, что W = 0, все связи должны быть необходимыми – лишь в этом случае структура её будет правильной. Проверим кинематическое качество какой-либо связи, в частности, вертикальной линейной связи ЕК. Если это необходимая связь, то для неё должно быть выполнено условие 
 0 (см. табл. 2).
0 (см. табл. 2).
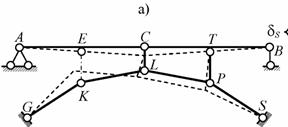

Рис.1.45
В соответствии с общей схемой выявления кинематической природы связи удаляем её и полученной системе, превратившейся в механизм с одной степенью свободы, задаём возможные перемещения, показанные схематически штриховыми линиями на рис. 1.45, а (при этом используется гипотеза отвердения). Искомая величина есть проекция на направление удалённой линейной связи ЕК взаимного (относительного) перемещения соединяемых ею точек Е и К. Задав отличное от нуля (числовое значение не играет никакой роли) малое перемещение какой-либо точки (например, С), определяем перемещения всех остальных характерных точек механизма (узлов, где соединяются диски). Для этого можно использовать:
а) мгновенные взаимные центры вращения дисков;
б) план мгновенных перемещений точек механизма (подобен плану мгновенных скоростей).
На рис. 1.45, б представлен план перемещений, на котором векторы  и линии LС, PL, KL и РТ ортогональны одноимённым линиям на схеме механизма (рис. 1.45, а). Отрезок ЕК на плане – полное взаимное перемещение точек Е и К; его проекция на направление удалённой связи (в рассматриваемом случае – на вертикаль) и есть перемещение . Оно получилось отличным от нуля – признак того, что исследованная связь – необходимая. Её возвращение в систему устраняет возможность возникновения любых перемещений при отсутствии деформаций элементов (план перемещений вырождается в точку), следовательно, система – геометрически неизменяемая, а поскольку W = 0, то и статически определимая.
и линии LС, PL, KL и РТ ортогональны одноимённым линиям на схеме механизма (рис. 1.45, а). Отрезок ЕК на плане – полное взаимное перемещение точек Е и К; его проекция на направление удалённой связи (в рассматриваемом случае – на вертикаль) и есть перемещение . Оно получилось отличным от нуля – признак того, что исследованная связь – необходимая. Её возвращение в систему устраняет возможность возникновения любых перемещений при отсутствии деформаций элементов (план перемещений вырождается в точку), следовательно, система – геометрически неизменяемая, а поскольку W = 0, то и статически определимая.
В двух других вышеуказанных вариантах качественного анализа систем со сложной структурой, основанных на способе замены связей и аналитическом признаке геометрической неизменяемости, используются, в отличие от остальных подходов, статические характеристики связей.
Сущность способа замены связей состоит в следующем. Если структура системы правильная, то любое конечное воздействие вызывает в ней, в случае устойчивого равновесия, единственное напряжённо-деформированное состояние с конечными значениями перемещений и силовых факторов, в том числе реакцию S некоторой связи, кинематическую природу которой требуется определить. Для системы со сложной структурой может оказаться трудоёмкой процедура составления и решения уравнений, с помощью которых находится S. Для упрощения осуществляется замена связей: исследуемая связь удаляется с приложением вместо неё реакции S, и в систему вводится новая (заменяющая) связь, причём таким образом, чтобы получилась система с простой структурой. Реакция заменяющей связи  , согласно принципу суперпозиции, может быть представлена как сумма её составляющих –
, согласно принципу суперпозиции, может быть представлена как сумма её составляющих –  (от некоторого воздействия – нагрузки) и
(от некоторого воздействия – нагрузки) и  (от реакции S удалённой исследуемой связи):
(от реакции S удалённой исследуемой связи):
=+. (7)
Величина может быть записана в виде = , где
, где  – реакция заменяющей связи от усилия S = 1. Поскольку силовой фактор S обеспечивает равновесие системы с удалённой связью при действии нагрузки, то заменяющая связь в работу не включается, и усилие в ней равно нулю: = += += 0, откуда S = –/. Очевидно, что для получения конечного значения усилия S нужно, чтобы знаменатель дроби не был нулевым, следовательно,
– реакция заменяющей связи от усилия S = 1. Поскольку силовой фактор S обеспечивает равновесие системы с удалённой связью при действии нагрузки, то заменяющая связь в работу не включается, и усилие в ней равно нулю: = += += 0, откуда S = –/. Очевидно, что для получения конечного значения усилия S нужно, чтобы знаменатель дроби не был нулевым, следовательно,
 – (8)
– (8)
признак необходимой связи по способу замены связей.
Если для получения системы с простой структурой требуется произвести замену не одной, а нескольких (n) связей, то признак группы необходимых связей принимает вид
 , (9)
, (9)
где – реакция i -й заменяющей связи от единичного усилия в удалённой k -й связи (от Sk = 1).
– реакция i -й заменяющей связи от единичного усилия в удалённой k -й связи (от Sk = 1).
Для систем с W = 0 требования (8) и (9) являются необходимыми и достаточными условиями геометрической неизменяемости.
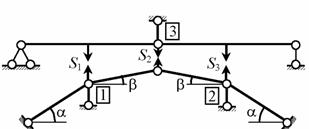
Рис.1.46
Например, в рассматриваемой системе со сложной структурой (см. рис. 1.44) удаляем одновременно три линейные связи, прикладывая вместо них реакции S 1 , S 2 и S 3 (рис. 1.46), а затем вводим в систему три заменяющие связи, обозначенные цифрами 1, 2 и 3 в прямоугольниках. Последовательно задавая S 1 = 1, S 2 = 1 и S 3 = 1, определяем вызываемые ими реакции заменяющих связей и формируем матрицу :
 ,
,
компоненты второго столбца которой вычислены при  . Определитель этой матрицы Det () = –3/2
. Определитель этой матрицы Det () = –3/2  – это означает, что три исследованные связи – необходимые, что является гарантией геометрической неизменяемости системы. Заметим, что для неё было бы достаточно осуществить замену лишь одной связи. Читателю предлагается самостоятельно убе-диться в том, что при
– это означает, что три исследованные связи – необходимые, что является гарантией геометрической неизменяемости системы. Заметим, что для неё было бы достаточно осуществить замену лишь одной связи. Читателю предлагается самостоятельно убе-диться в том, что при  (неудачная – зигзагообразная геометрия нижней части системы) получается Det () = 0 – признак мгновенной изменяемости системы.
(неудачная – зигзагообразная геометрия нижней части системы) получается Det () = 0 – признак мгновенной изменяемости системы.
И наконец, рассмотрим аналитический признак геометрической неизменяемости. Он формулирует условие невырожденности системы разрешающих уравнений, формируемых для вычисления параметров напряжённо-деформированного состояния сооружения. Для линейно деформируемой системы (физические свойства материала которой описываются законом Гука, перемещения малы и расчётная схема не изменяется в процессе деформирования) разрешающие уравнения могут быть представлены в виде линейных алгебраических уравнений  , где Y – вектор неизвестных силовых факторов и/или перемещений, А – матрица коэффициентов, зависящая от собственных (геометрических, жесткостных и др.) свойств сооружения, В – вектор параметров, отражающих влияние заданных воздействий. Единственное решение СЛАУ возможно лишь в случае, когда Det (A)– это и есть необходимое и достаточное аналитическое условие геометрической неизменяемости системы.
, где Y – вектор неизвестных силовых факторов и/или перемещений, А – матрица коэффициентов, зависящая от собственных (геометрических, жесткостных и др.) свойств сооружения, В – вектор параметров, отражающих влияние заданных воздействий. Единственное решение СЛАУ возможно лишь в случае, когда Det (A)– это и есть необходимое и достаточное аналитическое условие геометрической неизменяемости системы.
Заключение
Кинематический анализ должен предшествовать расчёту всегда, когда это практически возможно, – во всяком случае, для систем со сравнительно небольшим числом элементов. К сожалению, многоэлементные, особенно пространственные, системы могут иметь достаточно сложную структуру, трудно поддающуюся исследованию с помощью рассмотренных выше приёмов, требующих использования геометрических представлений, которые, ко всему прочему, плохо реализуются в компьютерных программах. В этих случаях может оказаться полезным использование аналогий с известными решениями, накопленный опыт и т.п. Если же кинематический анализ сложной системы оказывается неоправданно трудоемким, то он может не выполняться – при этом попытка автоматизированного компьютерного расчёта системы с не выявленной заблаговременно геометрической или мгновенной изменяемостью приведет к тому, что в процессе машинного счета будет обнаружена невозможность решения вырожденной системы уравнений или будут получены несоразмерно большие значения усилий (признак систем, близких к мгновенно изменяемым).
По мере накопления опыта кинематический анализ может выполняться не обязательно по вышеизложенной полной (двухэтапной) схеме, так как для систем с простой структурой во многих практических случаях оказывается достаточно только структурного анализа, чтобы сделать заключение о кинематической природе системы.
Теперь, когда понятны основное предназначение кинематического анализа (обеспечение функции «входного контроля» расчётной схемы системы) и методика его выполнения, отметим его прикладное значение:
– во-первых, выявленная в ходе структурного анализа последовательность образования системы (порядок соединения и добавления элементов и частей) позволяет для статически определимых систем определить рациональный порядок расчёта по следующему правилу: расчёт СОС выполняется в порядке, обратном последовательности её образования. Это значит, что определение реакций начинается со связей, наложенных на диски в последнюю очередь в процессе синтеза системы, и заканчивается реакциями связей, введённых на первом шаге образования системы. Иными словами, чем раньше появилась связь в ходе создания системы из начального набора несвязанных элементов-дисков, тем позднее в процессе расчёта определяется её реакция;
– во-вторых, с инженерной, практической точки зрения структурный анализ расчётной схемы сооружения является основой для назначения правильной последовательности укрупнительной сборки из отдельных конструктивных элементов и монтажа в проектном положении реальных строительных конструкций, в результате чего может быть обеспечена неизменяемость возводимого сооружения на каждом технологическом шаге.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 969; Нарушение авторских прав?; Мы поможем в написании вашей работы!