КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция № 3. Краткое содержание: Понятие о геометрических и кинематических характеристиках механизмов (функция положения и ее производные по времени и по обобщенной
|
|
|
|
Краткое содержание: Понятие о геометрических и кинематических характеристиках механизмов (функция положения и ее производные по времени и по обобщенной координате). Методы определения геометро-кинематических характеристик механизма. Цикл и цикловые графики. Связь между кинематическими и геометрическими параметрами. Кинематическое исследование типовых механизмов: рычажных, зубчатых, кулачковых, манипуляторов.
Понятие о геометрических и кинематических характеристиках механизмов.
Функцией положения механизма называется зависимость углового или линейного перемещения точки или звена механизма от времени или обобщенной координаты.
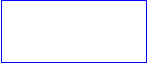
Геометрические и кинематические характеристики механизма

 dP(q)/dq Первая dP2(q)/dq2 Вторая
переда dP(q)/dq Первая dP2(q)/dq2 Вторая
переда    точная передаточная
P(q) функция функция точная передаточная
P(q) функция функция
 Vq, wq aq, eq Vq, wq aq, eq
  Функция
положения
V,w a,e Функция
положения
V,w a,e
  P(t) P(t)
  Скорость Ускорение
dP(t)/dt dP2(t)/dt2 Скорость Ускорение
dP(t)/dt dP2(t)/dt2
|
Рис. 3.1.
Кинематическими передаточными функциями механизма называются производные от функции положения по обобщенной координате. Первая производная называется первой передаточной функцией или аналогом скорости (обозначается Vq , wq ), вторая - второй передаточной функцией или аналогом ускорения (обозначается aq, eq ).
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью (обозначается V, w), вторая - ускорением (обозначается a, e).
Механизм с одной подвижностью имеет одно заданное входное движение и бесчисленное множество выходных (движение любого звена или точки механизма). Передаточные функции тех движений, которые в данном случае используются как выходные, называются главными, остальные - вспомогательными.
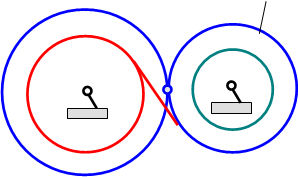
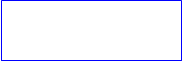
Рассмотрим схему механической системы образованной последовательно-параллельным соединением типовых механизмов. Схема включает входное звено, зубчатую передачу, кулачковый и рычажный механизмы и имеет два выходных звена.
Схема механической системы
 |

 С В 2
С В 2


 6 1
6 1
 | |||||||||||||
 | |||||||||||||
 | |||||||||||||
 | |||||||||||||
 | |||||||||||||
 | |||||||||||||
 |



 D A P O
D A P O
 | |||||||
 | |||||||
 | |||||||
 |

 K
K
 |

 E
E
 Q
Q

 4
4
Рис. 3.2.
 |
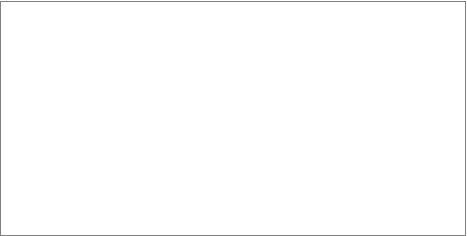
 f2 f3
f2 f3


 Кулачковый
Кулачковый
механизм - P3(f2)
f1 Зубчатый
 механизм P2(f1)
механизм P2(f1)

f2 Четырехшарнирный f6

 механизм - P6(f2)
механизм - P6(f2)
Рис. 3.3.
Функции положения в механизмах
 |
Функции положения
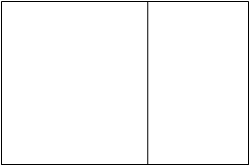 |
 P3 (f1)
P3 (f1)


 Главные
Главные
 Входное P6 (f1)
Входное P6 (f1)


 перемещение
перемещение
 f1 P2 (f1)
f1 P2 (f1)


 Вспомогательные P3 (f2)
Вспомогательные P3 (f2)

 P6 (f2)
P6 (f2)
Рис. 3.4.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 413; Нарушение авторских прав?; Мы поможем в написании вашей работы!