КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы автоматического управления
|
|
|
|
Классификация систем управления по алгоритму управления
Основные понятия и определения. Функциональная схема системы
Любой технологический процесс, протекающий в какой-либо установке, машине, двигателе, т.е. в самых разнообразных агрегатах, можно охарактеризовать одним или несколькими показателями процесса. Такими показателями могут быть самые различные физические, химические и другие параметры. Например, для обеспечения нагрева слитков в нагревательных колодцах необходимо изменять температуру колодца по определенному закону путем подачи определенных количеств топлива и воздуха. Причем количество воздуха должно подаваться в соответствии с количеством и качеством сжигаемого топлива, так как недостаток воздуха приводит к неполному сгоранию топлива, а его избыток – к затрате излишнего тепла на нагрев избыточного воздуха. Необходимо также поддерживать постоянным давление в ячейке колодца, так как избыток давления ведет к выбиванию газов и пламени из ячейки в окружающее пространство, а чрезмерное разрежение снижает экономичность работы колодца в связи с подсосом холодного воздуха, Как видно из приведенного примера, процесс нагрева слитков определяется различными физическими параметрами, а именно: температурой, расходом, давлением и т.д.
Физические параметры, которые определяют ход технологического процесса, принято называть координатами технологического процесса.
Координатами технологического процесса могут быть температура, давление, уровень, расход, напряжение, сила тока и т.д.
Из приведенного примера видно, что процесс нагрева слитков в колодце характеризуется целым рядом координат. При этом не обязательно все координаты нужно регулировать. Регулируемыми могут быть одна, две и более координат.
Координата технологического процесса, которую необходимо поддерживать постоянной или изменять по определенному закону, называется регулируемой координатой.
В ходе технологического процесса регулируемая координата согласно инструкции должна иметь постоянное значение, которое можно установить с помощью задающего устройства.
Заданным значением регулируемой координаты называется то ее значение, которое согласно заданию должно иметь место в данный момент времени.
В ходе технологического процесса значение регулируемой координаты может быть меньше или больше заданного, которое называют текущим.
Текущим значением регулируемой координаты называется действительное ее значение в данный момент времени.
Текущее значение регулируемой координаты можно привести к заданному значению, воздействуя на клапан, заслонку или какой-либо другой орган, с помощью которого можно изменять расход вещества или энергии.
Устройство, предназначенное для изменения расхода вещества или энергии, называется регулирующим органом. С помощью регулирующего органа осуществляется воздействие на процесс. Сам процесс протекает в агрегате.
Агрегат или его часть, в которой протекает технологический процесс, подлежащий автоматизации, называется объектом регулирования или объектом управления.
В объект регулирования поступает вещество или энергия, которая называется регулируемой средой, а затем отводится из него. Регулируемая координата не будет изменяться только при равенстве притока и стока регулируемой среды, т.е. приток энергии должен быть равен стоку. Другими словами регулируемая координата не будет изменяться при наличии динамического равновесия между притоком и стоком.
Всякое нарушение динамического равновесия, т.е. баланса между притоком и стоком регулируемой среды, называется возмущающим воздействием или возмущением. Возмущения могут создаваться как на стороне притока, так и на стороне стока, или же одновременно на притоке и стоке. Возмущение на притоке, не связанное с перемещением регулирующего органа, называется внутренним возмущением. Все другие типы возмущений называются внешними.
Современные АСУ представляют собой сложные комплексы взаимодействующих технических устройств и элементов, работа которых основана на различных физических принципах. Различно также их конструктивное выполнение и технические характеристики. Поэтому при изучении курса теории автоматического управления основное внимание уделяется не техническим свойствам отдельных элементов, а функциям, которые они выполняют в системе управления. Наглядное представление об этом дают функциональные схемы АСУ.
На функциональной схеме отдельные элементы системы изображают в виде прямоугольника (рис. 1.2). Связи между элементами схемы и направление их действия изображают стрелками, т.е. каждый элемент системы можно изобразить следующим образом:
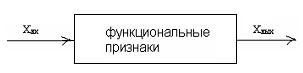
Рисунок 1.2 – Обозначение звена на функциональной схеме
Стрелка слева обозначает, что на этот элемент воздействует какой-то предыдущий элемент. И это воздействие является входом для данного элемента. Стрелка справа обозначает, что этот элемент воздействует своим выходом на последующий элемент. Внутри прямоугольника указывают функциональные признаки данного элемента, т.е. операцию, которую выполняет элемент в АСУ. Так, на рисунке 1.1 входной координатой термоэлектрического термометра является температура печи, а выходной координатой – т.э.д.с. При этом термометр выполняет функции преобразования. Входной координатой потенциометра является т.э.д.с., а выходной координатой – напряжение, пропорциональное текущей температуре; потенциометр выполняет измерительные функции и т.д. Исходя из сказанного, функциональную схему АСУ можно представить следующим образом:
Таким образом, функциональная схема АСУ включает в себя: задающее устройство (ЗУ), суммирующее устройство (СУ), усилитель (У), исполнительный механизм (ИМ), регулирующий орган (РО), объект регулирования (ОР), преобразующее устройство (ПУ), измерительное устройство (ИУ).
Задающее устройство оказывает управляющее (или иначе задающее) воздействие на вход системы, которое в дальнейшем будем обозначать g(τ).
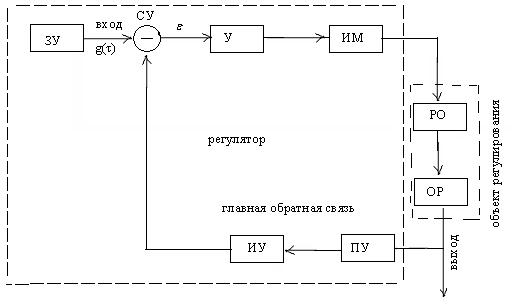
Рисунок 1.3 – Развернутая функциональная схема АСУ
Управляющее воздействие может иметь постоянную величину при необходимости поддержания постоянного заданного значения регулируемой координаты или же изменяться по определенному закону, если в технологическом процессе по этому закону должна изменяться регулируемая координата. Задающее воздействие сравнивается с преобразованным значением выходной координаты Х о.с.. Воздействие выхода системы регулирования на её вход называется главной обратной связью. Как правило, главная обратная связь является отрицательной.
Сравнение задающего воздействия и выхода системы осуществляется в суммирующем устройстве, которое на схеме представлено в виде круга, а внутри указана алгебраическая операция, т.е.
 (1.1),
(1.1),
где  - рассогласование (отклонение регулируемой координаты от заданного значения или ошибка регулирования).
- рассогласование (отклонение регулируемой координаты от заданного значения или ошибка регулирования).
Сам агрегат, в котором протекает технологический процесс, и регулирующий орган рассматривают как единое целое и называют объектом управления.
Как видно из приведенной схемы, к регулируемому объекту присоединен комплекс различных устройств. Комплекс устройств, присоединяемых к выходу регулируемого объекта и воздействующих на его вход, а также обеспечивающих или автоматическое поддержание заданного значения его регулируемой координаты, или автоматическое изменение её по определенному закону, принято называть автоматическим регулятором.
Таким образом, АСУ есть совокупность автоматического регулятора и объекта управления, динамически взаимодействующих между собой. Исходя из последнего, функциональную схему АСУ можно представить следующим образом (рис. 1.4).
Из функциональной схемы видно, что регулятор сравнивает действительное значение регулируемой координаты Хвых с её заданным значением g(τ) и на основании рассогласования вырабатывает регулирующее воздействие Хр(τ) на объект управления. Регулирующее воздействие это такое воздействие, которое стремится привести регулируемую координату к заданному значению.

Рисунок 1.4 – Обобщенная функциональная схема АСУ
Однако к объекту приложено ряд возмущающих воздействий (Z1,Z2,..., Zn). Возмущающее воздействие это такое воздействие, изменение которого приводит к отклонению регулируемой координаты от заданного значения.
В настоящее время имеется огромное количество самых разнообразных систем автоматического управления. Поэтому дать законченную классификацию АСУ в условиях, когда создаются всё новые и новые системы, достаточно трудно. Не представляется возможным дать и подробную классификацию уже реализованных систем, так как классификационных признаков, по которым можно все существующие системы подразделить на строго определенные классы, имеется очень большое количество.
В настоящее время наиболее приемлемой классификацией является классификация, в качестве основного классификационного признака в которой принята используемая системой информация, т.е. совокупность сведений о технологическом процессе и регуляторе.
При этом различают начальную и рабочую информацию.
Начальной информацией называется совокупность сведений о технологическом процессе, подлежащем автоматизации, и системе управления этим процессом, известная до построения и начала функционирования системы.
Рабочей информацией называется совокупность сведений о текущем состоянии технологического процесса, получаемых и используемых при осуществлении процесса автоматического управления.
Из функциональной схемы (рис. 1.4) видно, что носителями рабочей информации являются сигналы Хвых(τ) и g(τ). Алгоритм функционирования это закон изменения управляющего воздействия g(τ). По виду закона изменения управляющего воздействия g(τ) системы подразделяют на системы стабилизации, программного управления и следящие (рис. 1.5).
Системы автоматического управления называются системами стабилизации, задачей которых является поддержание регулируемой координаты на определенном постоянном уровне. Для таких систем характерно следующее:
Хвых(τ)=const
g(τ)= const
Первое условие является желательным, а второе обязательным. Примером таких систем может служить система, приведенная на рисунке 1.1. К этим системам также относятся системы регулирования расхода, давления, силы тока, напряжения, т.е. системы, которые обеспечивают поддержание регулируемой координаты на определенном уровне.
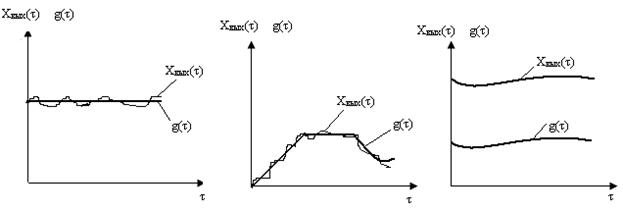
Рисунок 1.5 – Графики изменения задающего воздействия
и регулируемой координаты
Системы автоматического управления называются системами программного управления, задачей которых является изменение регулируемой координаты по определенному заранее заданному закону. Для таких систем характерно следующее:
g(τ)= f (τ)
Хвых(τ)= g(τ)
Примерами таких систем могут служить системы регулирования температуры в термических печах при нагреве заготовок под закалку, отжиг.
Системы автоматического управления называются следящими системами, у которых закон изменения регулируемой координаты заранее не известен, а определяется независимыми изменениями какой-либо другой регулируемой координаты, называемой ведущей.
Для таких систем характерно следующее:
g(τ)= f (β)
Хвых(τ)= g(τ)
Примерами таких систем являются системы регулирования соотношения топливо-воздух, обработки детали по шаблону, регулирование соотношения расхода воды и массы аглошихты.
Одна из основных задач построения автоматических систем состоит в том, чтобы решить, каким образом при помощи простейших технических средств получить и передать тот объем информации, который необходим для достижения цели управления.
Несмотря на существенное разнообразие технических процессов, построение аппаратуры управления и автоматических систем основывается на ряде общих принципов управления.
Принцип управления – это идея или фактор, положенные в основу организации регулирующего воздействия. К ним относят принцип управления по возмущению, принцип управления по отклонению, принцип комбинированного управления и принцип адаптации.
Принцип автоматического управления определяет, как и на основе какой информации формировать управляющее воздействие в системе. Одним из основных признаков, характеризующих принцип управления, является требуемая для выработки управляющего воздействия рабочая информация, а следовательно, и конфигурация цепи передачи воздействий в системе. Выбор принципа построения автоматической системы зависит от ее назначения, характера изменения задающего и возмущающих воздействий, стабильности параметров управляемого объекта и элементов управляющего устройства и т.п. В системах автоматического управления используется следующие принципы управления:
• принцип управления по отклонению;
• принцип управления по возмущению;
• комбинированный принцип управления;
• принцип адаптации.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1557; Нарушение авторских прав?; Мы поможем в написании вашей работы!