КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
И импульсных кривых разгона
|
|
|
|
Экспериментальное определение кривых разгона
Подготовка и планирование эксперимента по снятию кривых разгона начинается с изучения технологического объекта, конструкции объекта особенностей его работы, оснащения контрольно-измерительной аппаратурой. Необходимо ознакомиться с технической литературой, в которой описан исследуемый объект или ему подобные, проанализировать работу объекта в режиме нормальной эксплуатации и записи регистрирующих приборов. После этого составляется структурная схема объекта с указанием основных входных и выходных координат объекта.
Для получения кривых разгона рекомендуется воспользоваться схемой, показанной на рисунке 5.11.
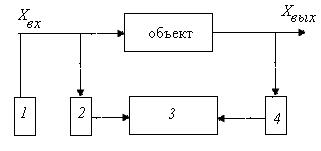
Рисунок 5.11 – Схема проведения эксперимента по снятию кривых разгона
К объекту управления подключается панель дистанционного управления регулирующим органом (1), датчики электрических сигналов входной (2) и выходной (3) величин, а также многоточечный регистратор (4).
При проведении опыта прежде всего необходимо добиться установившегося состояния объекта по рассматриваемой координате. Перед подачей возмущения следует поддерживать постоянное или практически близкое к этому значение выходной координаты, нагрузки и других координат, влияющих рассматриваемую выходную координату. Наряду с этим важно стабилизировать достаточно точно новое значение входной координаты после её изменения до момента окончания эксперимента.
При выборе величины вносимого возмущения в каждом отдельном случае следует учитывать условия работы объекта: общий уровень случайных эксплуатационных помех, допустимый диапазон отклонения входной и выходной координат объекта, примерный коэффициент передачи объекта.
В общем случае при определении кривых разгона величина вносимого возмущения должна составлять 5-15% максимально возможного для данного режима работы объекта значения входной координаты. Увеличивать вносимое возмущение нецелесообразно, так как это приводит к увеличению влияния нелинейности объекта и заметному нарушению технологического процесса; уменьшение возмущения ниже нижнего предела, как правило, затрудняет выделение кривой разгона из случайных флуктуаций выходной координаты. При определении кривых разгона астатических объектов, не обладающих самовыравниванием, опыт заканчивают при достижении установившегося значения скорости изменения выходной координаты. Для статических объектов, обладающих самовыравниванием, моментом окончания опыта является момент достижения нового установившегося значения выходной координатой. После проведения эксперимента строят кривые разгона и импульсные кривые разгона. Динамические свойства почти всех промышленных объектов изменяются во времени по различным причинам. Скорость изменения динамических свойств объектов обычно невелика, и поэтому в первом приближении можно считать неизменными в интервале времени наблюдения переходных процессов. Допущение о стационарности динамических свойств объектов позволяет аппроксимировать полученные кривые решениями обыкновенных дифференциальных уравнений с постоянными коэффициентами.
Предположение о линейности в «малом» динамических свойств объектов ещё более сужает класс дифференциальных уравнений, решениями которых аппроксимируются экспериментальные функции. Термин линейность в «малом» означает, что описание переходных процессов линейными дифференциальными уравнениями удовлетворяет принципу суперпозиции в некотором интервале изменений входной координаты. Суть принципа суперпозиции заключается в том, что реакция линейной системы на сумму входных воздействий равна сумме реакций системы на каждое воздействие в отдельности. Интервал изменений входной координаты зависит от кривизны статической характеристики и наличия в объекте нелинейностей, действие которых проявляется только в переходном режиме. Опыт показывает, что статические зависимости большинства промышленных объектов почти всегда могут быть линеаризованы в окрестности равновесного режима Хн(τ) в интервале изменения входной координаты ±(0,05÷0,15) Хн(τ).
Совокупность рассмотренных допущений позволяет описать динамические промышленных объектов математическими выражениями следующего вида:
1) дифференциальным уравнением
 (5.23),
(5.23),
где  - постоянные коэффициенты; m ≤ n; τз - постоянная положительная величина, называемая временем запаздывания;
- постоянные коэффициенты; m ≤ n; τз - постоянная положительная величина, называемая временем запаздывания;
2) передаточной функцией
 (5.24)
(5.24)
3) амплитудно-фазовой характеристикой (АФХ)
 (5.25)
(5.25)
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 944; Нарушение авторских прав?; Мы поможем в написании вашей работы!