КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обработка кривой разгона статического объекта
|
|
|
|
По экспериментальным данным строим кривую разгона статического объекта (рис. 5.16).
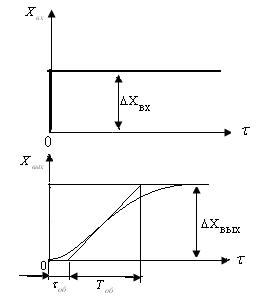
Рисунок 5.16 – Кривая разгона статического объекта
Выбор передаточной функции осуществим из следующих соображений. Предположим, что ступенчатое возмущающее воздействие было подано на вход запаздывающего звена, а его выходная координата поступает на вход апериодического звена. Характер переходных процессов, происходящих в этом случае, представлен на рисунке 5.17. В соответствии с рисунком 5.17 реальный объект можно представить как последовательное соединение запаздывающего и апериодического звеньев (рис. 5.18).
Так как передаточная функция апериодического звена имеет вид:
а запаздывающего -

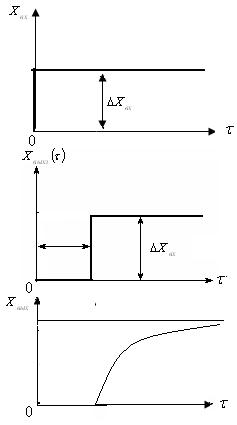
Рисунок 5.17 - К определению вида передаточной функции статического объекта
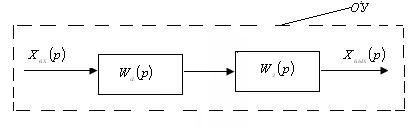
Рисунок 5.18 - Структурная схема статического объекта
то передаточная функция объекта управления имеет вид:
 (5.30)
(5.30)
Параметры передаточной функции определяем из графика кривой разгона (рис. 5.16).
 (5.31)
(5.31)
Для определения постоянной времени и времени запаздывания необходимо провести касательную к кривой разгона в точке наибольшей скорости изменения выходной координаты (в точке перегиба кривой). Отрезок, который отсекает касательная на оси времени и будет соответствовать времени запаздывания, проекция отрезка касательной, заключенного между старым и новым установившимися значениями, на ось времени определяет постоянную времени.
Физический смысл параметров статического объекта следующий:
τоб – характеризует отставание реакции объекта на возмущающее воздействие;
Тоб – характеризует инерционность объекта, быстроту протекания процессов; чем больше постоянная времени, тем медленнее протекает переходный процесс;
Коб – характеризует усилительные свойства объекта в статическом режиме.
По величине Тоб объекты подразделяют на:
а) инерционные объекты, у которых постоянная времени больше 20 секунд (к ним относят объекты с регулируемыми координатами температуры, газового состава, влажности, солесодержания);
б) малоинерционные объекты, у которых постоянная времени меньше 10 секунд (к ним относят объекты с регулируемыми координатами расхода, уровня, соотношения расходов топлива и воздуха).
Определение параметров передаточной функции статического объекта можно осуществить и методом двух координат. Метод двух координат является эмпирическим методом и суть его заключается в следующем. Коэффициент передачи объекта определяется также, как и в предыдущем случае. Для определения постоянной времени и времени запаздывания на кривой разгона выбирают две точки (рис. 5.19).
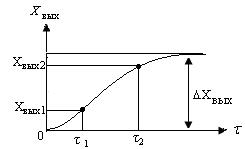
Рисунок 5.19 – Определение параметров объекта методом двух координат
Положение точек на кривой разгона определяют следующим образом:
 (5.32)
(5.32)
 (5.33)
(5.33)
Приведенные координаты (5.32) и (5.33) приводят к безразмерному виду:
 (5.34)
(5.34)
 (5.35)
(5.35)
Для определения времени запаздывания и постоянной времени пользуются эмпирическими формулами:
 (5.36)
(5.36)
 (5.37)
(5.37)
или
 (5.38)
(5.38)
Объект управления с полученными параметрами можно рассматривать как последовательное соединение запаздывающего и апериодического звеньев. Однако такая модель объекта не абсолютно адекватна реальному объекту. Поэтому в некоторых случаях прибегают к трехзвенной аппроксимации, представляя объект управления как последовательное соединение трех звеньев: двух апериодических звеньев и звена чистого запаздывания (рис. 5.20). Передаточные функции указанных звеньев имеют вид:

В этом случае передаточная функция объекта имеет вид:
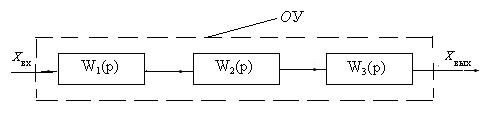
Рисунок 5.20 – Трехзвенная аппроксимация объекта управления
 (5.39)
(5.39)
 (5.40)
(5.40)
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1883; Нарушение авторских прав?; Мы поможем в написании вашей работы!