КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие переходного процесса в АСУ
|
|
|
|
Статические и астатические АСУ
Системы автоматической стабилизации, следящие системы и системы программного управления подразделяют на две группы: системы статические и системы астатические. Принадлежность системы к статическим иди астатическим определяется законом регулирования. К статическим системам относятся системы, которые в своей структуре содержат П-регулятор или ПД-регулятор. К астатическим системам относятся системы, которые в своей структуре содержат И-регулятор, ПИ-регулятор или ПИД-регулятор, т.е. регуляторы, содержащие в своей структуре интегральную составляющую. Существенным различием статических и астатических систем является тот факт, что статическим системам присуща статическая ошибка, а в астатических системах она отсутствует.
Система автоматического регулирования будет статической по отношению к возмущающему воздействию, если при стремлении возмущающего воздействия к постоянной величине отклонение регулируемой координаты также стремится к постоянной величине, отличной от нуля и зависящей от величины приложенного воздействия.
Система автоматического регулирования будет астатической по отношению к возмущающему воздействию, если при стремлении возмущающего воздействия к постоянной величине отклонение регулируемой координаты стремится к нулю и не зависит от величины приложенного воздействия.
На рисунке 7.2 приведена обобщенная структурная схема АСУ, к которой приложены возмущающие воздействия по заданию и по нагрузке.
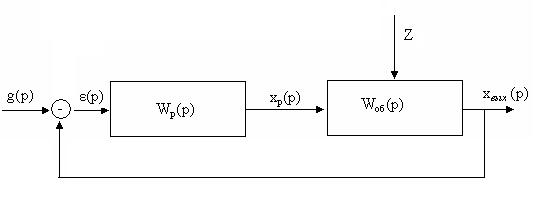
Рисунок 7.2 – Обобщенная структурная схема АСУ
Под действием возмущающего воздействия по нагрузке или по заданию регулируемая координата начинает отклоняться от заданного значения (рис.7.3 и 7.4). Реагируя на это отклонение, регулятор формирует регулирующее воздействие, которое поступает на вход объекта и стремится привести регулируемую координату к заданному значению.
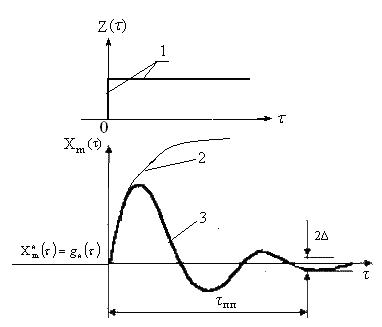
Рисунок 7.3 – Переходные процессы в замкнутой системе при возмущении по нагрузке
На рисунке 7.3 показаны возмущающее воздействие по нагрузке (1) и реакция объекта на это возмущение (2), а также процесс регулирования в замкнутой системе (3).
Рисунок 7.4 - Переходные процессы в замкнутой системе при возмущении по заданию
На рисунке 7.4 показано возмущение по заданию (1) и процесс регулирования в замкнутой системе (2).
Закон или график изменения регулируемой координаты во времени, которое вызвано возмущающим воздействием, называется переходным процессом или процессом регулирования.
Переходный процесс является важнейшей характеристикой АСУ и представляет собой реакцию системы на возмущающее воздействие. В реальных условиях на систему действуют стохастические (случайные) возмущения по нагрузке. Однако в автоматике, как правило, рассматривают процессы регулирования, вызванные скачкообразными возмущающими воздействиями.
Если на систему действует скачкообразное возмущение по нагрузке, то зависимость между выходной и входной координатами в операторной форме можно записать следующим образом:
 (7.18)
(7.18)
Для получения обобщенного уравнения переходного процесса при возмущении по нагрузке применим к уравнению (7.18) обратное преобразование Лапласа.
 (7.19)
(7.19)
Если на систему действует скачкообразное возмущение по заданию, то зависимость между выходной и входной координатами в операторной форме можно записать следующим образом:
 (7.20)
(7.20)
Для получения обобщенного уравнения переходного процесса при возмущении по заданию применим к уравнению (7.20) обратное преобразование Лапласа.
 (7.21)
(7.21)
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1931; Нарушение авторских прав?; Мы поможем в написании вашей работы!