КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вращающиеся трансформаторы (резольверы)
|
|
|
|
Большие габариты и вес.
2. Теоретически нелинейность выходной характеристики.
3. Малая выходная мощность.
4. Непостоянство фазы UГ.
Назначение и конструкция
Вращающиеся трансформаторы предназначены для преобразования механического перемещения угла поворота ротора в электрический сигнал – выходное напряжение, амплитуда которого зависит от угла поворота ротора.
Напряжение на выходе меняется по определенному закону. В зависимости от закона изменения напряжения вращающееся трансформаторы делятся на синусные 
 , косинусные
, косинусные  , синусно-косинусные
, синусно-косинусные
 , линейные и вращающиеся трансформаторы – построители (предназначенные для решения геометрических задач), масштабные вращающиеся трансформаторы используются как приборы согласования, трансформаторные сельсины в системах синхронной связи, фазовращатели. Один и тот же вращающийся трансформатор может выполнять различные функции. Его выходные характеристики зависят от схемы соединения обмоток и их питания.
, линейные и вращающиеся трансформаторы – построители (предназначенные для решения геометрических задач), масштабные вращающиеся трансформаторы используются как приборы согласования, трансформаторные сельсины в системах синхронной связи, фазовращатели. Один и тот же вращающийся трансформатор может выполнять различные функции. Его выходные характеристики зависят от схемы соединения обмоток и их питания.
По конструкции вращающиеся трансформаторы не отличаются от асинхронных машин с фазным ротором. В пазах статора и ротора располагаются две взаимно перпендикулярные обмотки. Электрический контакт с обмоткой ротора осуществляется с помощью контактных колец, если ротор вращается. Если ротор совершает поворот на небольшой угол, то контакт осуществляется с помощью специальных пружин. Угол поворота ограничен углом закрутки пружины.
Статор и ротор набираются из листов электротехнической стали, тщательно изолированных между собой. Для их изготовления используются штампы высокой точности.
Обычно обе обмотки статора S и K имеют одинаковое число витков (WS= WK) и активные одинаковые сопротивления.
WK) и активные одинаковые сопротивления.
Обмотки ротора А и В также выполняются одинаковыми (WA=WB; rA=rB; XA=XB).
На рисунке 2.5.1 изображен общий вид вращающегося трансформатора.
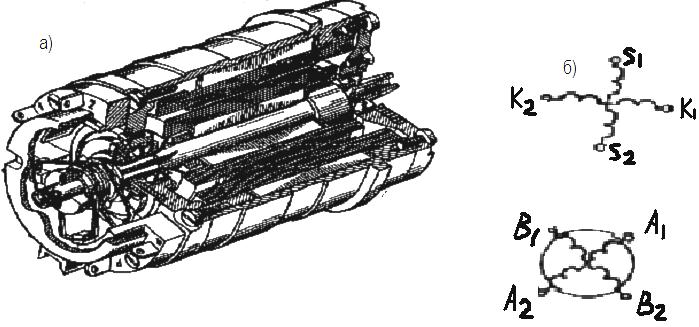
Рисунок 2.5.1
Особенностью вращающихся трансформаторов является то, что у них взаимоиндуктивность между первичными обмотками (статора) и вторичными обмотками (ротора) при повороте ротора изменяется строго по синусоидальному (или косинусоидальному) закону от угла поворота  , что при определенных условиях обеспечивает такой же закон изменения амплитуды ЭДС вторичных обмоток.
, что при определенных условиях обеспечивает такой же закон изменения амплитуды ЭДС вторичных обмоток.
К вращающемся трансформаторам предъявляются высокие требования в отношении точности воспроизведения заданной функциональной зависимости выходного напряжения от угла поворота ротора.
Точность вращающихся трансформаторов определяется максимальной погрешностью воспроизведения заданной функции, которая определяется в процентах от выходного максимального напряжения и находится в пределах 0,05…0,25%.
Вращающиеся трансформаторы делят на четыре класса точности:
- нулевой класс – максимальная ошибка не более 0,05%
- первый класс – максимальная ошибка 0,05…0,1%
- второй класс – максимальная ошибка 0,1…0,25%
- третий класс – максимальная ошибка свыше 0,25%
Высокая точность обеспечивается также выбором типа обмотки, материалом магнитной цепи, степенью насыщения, соотношением числа пазов статора и ротора.
Погрешности вращающихся трансформаторов:
1. Систематические – определяются принципом действия, конструкцией, материалами, принятой технологией, условиями эксплуатации (температурой, напряжением питания, частотой сети и т.д.)
2. Случайные – зависят от технологического разброса, отклонений свойств материала от номинальных, неточности изготовления деталей, сборки и т.д. (у каждого вращающегося трансформатора свои).
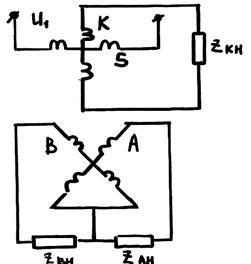
Электрическая схема вращающегося трансформатора представлена на
 рисунке 2.5.2:
рисунке 2.5.2:
Обмотки статора и ротора сдвинуты на угол a. Поворот ротора вращающегося трансформатора осуществляется редукторным механизмом высокой точности. Если обмотку возбуждения S включить на напряжение UГ, то по ней потечет ток IS, который создаст поток ФS. Поток ФS сцепляется с обмотками А и В и наводит в них ЭДС, величины которой зависят от угла поворота ротораa.
Рисунок 2.5.2
 (1)
(1)
где EA.max, EB.max – максимальная ЭДС обмоток А и В, наводимая в случае совпадения осей обмоток А и S (В и S), т.е. a=90°.
 (2)
(2)
т.е. ось обмотки совпадает с осью потока.
ES – ЭДС, наводимая потоком ФS в первичной обмотке статора S.
k(a) – коэффициент трансформации вращающегося трансформатора – он не является постоянной величиной, а зависит от числа витков и положения обмоток.
Но по закону синуса или косинуса ЭДС изменяется только при холостом ходе, когда обмотки ротора не подключены к нагрузке. Синусный вращающийся трансформатор может работать когда включены только две обмотки – обмотка статора S (возбуждения) и обмотка ротора А (выходная обмотка).
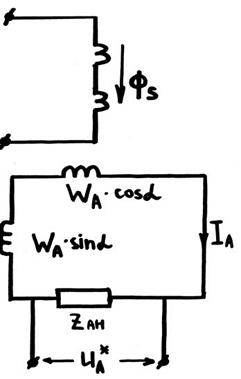
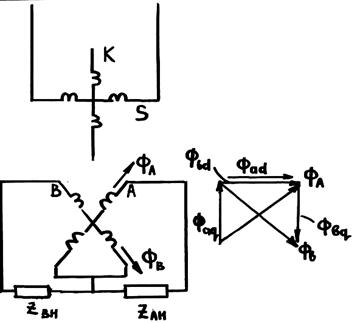
Схема включения синусного вращающегося трансформатора и векторная диаграмма его магнитных потоков изображена на рисунке 2.5.3
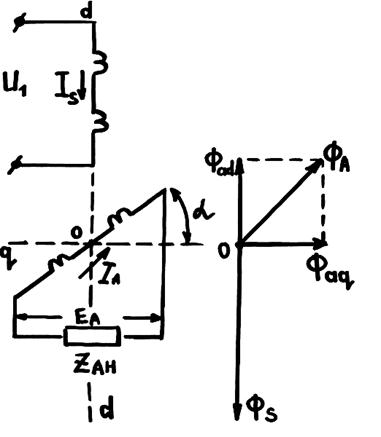
Поток ФS наводит ЭДС EA,в обмотке А протекает ток IA, создается поток ФА. ФА находится в противофазе потоку ФS по закону Ленца.
Его ФА можно разложить на две составляющие по продольной Фad и поперечной Фaq оси.
Рисунок 2.5.3
Соответственно можно разложить и МДС обмотки А:


 Т.е. можно изобразить, что каждый поток создается своей обмоткой (рис 2.5.4):
Т.е. можно изобразить, что каждый поток создается своей обмоткой (рис 2.5.4):
Итак, ток IA, протекающий под действием ЭДС в обмотке по продольной оси создает поток Фad в противофазе ФS. В поперечной обмотке создается поток Фaq. Этот поток ничем не компенсируется и свободно проходит по магнитной цепи. Он создает в обмотке А ЭДС самоиндукции, искажающею форму кривой выходного напряжения  :
:
 , где
, где
 - магнитная проводимость.
- магнитная проводимость.
Рисунок 2.5.4
Представим значения для ЭДС в выражение выходного напряжения

Учитывая, что ; если считать, что ES»U1., можно записать
; если считать, что ES»U1., можно записать
 ; обозначим
; обозначим 
|
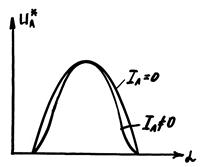
Рисунок 2.5.5
На рисунке 2.5.5 представлена зависимость выходного напряжения от угла поворота на холостом ходу и под нагрузкой 
Изменение кривой выходного напряжения происходит за счет поперечного потока, который наводит ЭДС самоиндукции EAL. Такая кривая выходного напряжения недопустима. С искажением борются путем симметрирования.
Симметрирование – подбор сопротивлений цепей статорных и роторных обмоток, при которых амплитуды ЭДС выходных обмоток изменяются по строго синусоидальному закону от угла поворота.
Симметрирование бывает первичное и вторичное.
Вторичное симметрирование.
Цель любого симметрирования – уничтожение поперечного магнитного потока, который вносит погрешность в выходную характеристику.
Вторичное симметрирование – подбор таких сопротивлений роторных обмоток при которых отсутствует поперечный магнитный поток.
На рис 2.5.6 изображена схема синусно- косинусного вращающегося трансформатора при вторичном симметрировании и векторная диаграмма его потоков.
 Из векторной диаграммы видно, что потоки по продольной оси Фad и Фbd складываются, а по поперечной оси Фaq и Фbq вычитаются, т.е. Фaq и Фbq компенсируют друг друга.
Из векторной диаграммы видно, что потоки по продольной оси Фad и Фbd складываются, а по поперечной оси Фaq и Фbq вычитаются, т.е. Фaq и Фbq компенсируют друг друга.
Условие полной компенсации поперечного потока или условие вторичного симметрирования:
Рисунок 2.5.6

т.е. необходимо, чтобы была равна нулю сумма поперечных составляющих МДС обмоток ( ), т.е. модули МДС были равны;
), т.е. модули МДС были равны; 
обычно WA=WB, тогда  (*)
(*)
 , тогда с учетом (*):
, тогда с учетом (*):
Учитывая схему вторичного симметрирования, полные сопротивления роторных цепей определяются суммой собственного сопротивления обмоток
 и сопротивления нагрузки
и сопротивления нагрузки  (
( и
и  )
)
|

 , следовательно условием вторичного симметрирования является равенство сопротивлений нагрузки обмоток А и В:
, следовательно условием вторичного симметрирования является равенство сопротивлений нагрузки обмоток А и В:
Особенность вторичного симметрирования – входное сопротивление вращающегося трансформатора (ZВХ), а следовательно и потребляемый из сети ток IS не зависят от угла поворота ротора.
А выходное сопротивление (ZВЫХ) непостоянно – оно зависит от угла поворота ротора, следовательно, можно выполнять только при постоянной нагрузке (не всегда). Последнее для целого ряда схем меняется не желательным образом и ограничивает применение синусно-косинусных вращающихся трансформаторов
Первичное симметрирование – сводится к включению в цепь квадратурной обмотки статора сопротивления ZКН. Условием первичного симметрирования является равенство полных сопротивлений цепей обмоток статора – возбуждения S и квадратурной К.

где  - сопротивления источника питания; линии, соединяющей источник и обмоткой S; и сопротивление, подключаемое к зажимам квадратурной обмотки.
- сопротивления источника питания; линии, соединяющей источник и обмоткой S; и сопротивление, подключаемое к зажимам квадратурной обмотки.
 - собственное сопротивление обмоток S и К.
- собственное сопротивление обмоток S и К.
|
 следовательно условием первичного симметрирования является равенство
следовательно условием первичного симметрирования является равенство
В том случае, когда синусно-косинусных вращающийся трансформатор питается от источника большой мощности, сопротивление которого  , для осуществления первичного симметрирования достаточно замкнуть накоротко квадратурную обмотку
, для осуществления первичного симметрирования достаточно замкнуть накоротко квадратурную обмотку
Т.е. сопротивление источника питания зависит от мощности, чем больше мощность, тем меньше сопротивление.
Физическую мощность первичного симметрирования можно объяснить тем, что вносящий погрешность поперечный поток ротора демпфируется токами квадратурной обмотки, которые возникают при наличии поперечного потока.
 Первичное симметрирование выполняется при любых нагрузках (ZВЫХ=const), но ZВХ зависит от угла a, в этом недостаток. Поэтому на практике, где это возможно применяют одновременно вторичное и первичное симметрирование (рис. 2.5.7). Оно обеспечивает наилучшие характеристики вращающегося трансформатора.
Первичное симметрирование выполняется при любых нагрузках (ZВЫХ=const), но ZВХ зависит от угла a, в этом недостаток. Поэтому на практике, где это возможно применяют одновременно вторичное и первичное симметрирование (рис. 2.5.7). Оно обеспечивает наилучшие характеристики вращающегося трансформатора.
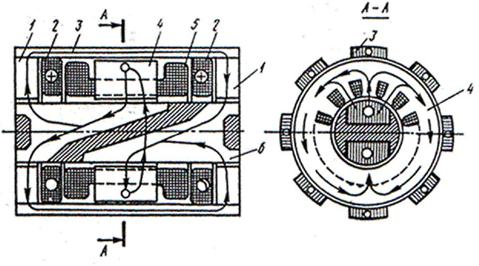
Рисунок 2.5.7.
Линейные вращающиеся трансформаторы.
Для получения линейной зависимости UВЫХ=f(a) необходимо, чтобы это напряжение определялось уравнением:
 ,
,
где m – величина постоянная, определяемая магнитными и электрическими параметрами линейного вращающегося трансформатора.
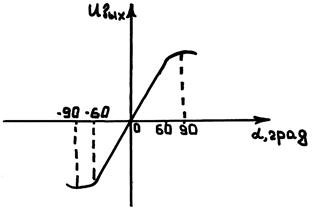
При m» 0,54 зависимость получается линейной с точностью до 1% в пределах a=0…60°.(рис. 2.5.8)
Рисунок 2.5.8
Схема линейного вращающегося трансформатора представлена на
 рисунке 2.5.9
рисунке 2.5.9
Рисунок 2.5.9
Для получения такой зависимости синусную обмотку соединяют последовательно с компенсационной обмоткой, а косинусную обмотку замыкают на сопротивление ZС. Величина ZС выбирается такой, чтобы обеспечить полное вторичное симметрирование при заданной нагрузке ZH.
Точность вращающегося трансформатора оценивается не только по величине максимальной погрешности отображения заданной зависимости, но характеризуется также асимметрией нулевых точек.
Асимметрия нулевых точек определяется следующим образом:
В сеть включают сначала одну обмотку статора, а затем другую, определяя каждый раз такое положение ротора, при котором напряжение на какой-либо его обмотке равно нулю (или минимально).
При переключении напряжения с первой обмотки на другую, a должен быть равен 90°. Отклонение a(угла поворота ротора) от 90° и определяет асимметрию нулевых точек. Ошибка асимметрии находится в пределах от
10” до 6’40”.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 4462; Нарушение авторских прав?; Мы поможем в написании вашей работы!