КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет установившихся режимов работы механической части
|
|
|
|
Расчет опирается на приведенное основное уравнение движения привода, записанное для режима статики, то есть для случая, когда
 . (1)
. (1)
Тогда из основного уравнения движения электропривода получаем, что механическая часть описывается уравнением
 . (2)
. (2)
Каждый момент в общем случае является функцией угловой скорости ω. Поэтому уравнение (2) можно записать в виде
 . (3)
. (3)
Решая это уравнение, находят угловую скорость  . Часто (3) решают графо-аналитически. Для этого, как известно из аналитической геометрии, необходимо построить МХ двигателя
. Часто (3) решают графо-аналитически. Для этого, как известно из аналитической геометрии, необходимо построить МХ двигателя  , МХ РОМ
, МХ РОМ  и найти точку их пересечения.
и найти точку их пересечения.
Рассмотрим пример расчета угловой скорости асинхронного двигателя (АД) в установившемся режиме работы. МХ АД представлена на рисунке 7. Будем полагать, что РОМ создают постоянный активный момент сопротивления. МХ РОМ также представлена на рисунке 7.
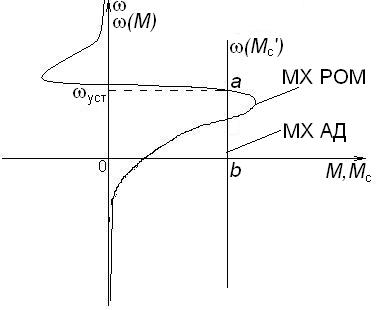
Рисунок 7-Графо-аналитический расчет установившегося режима работы механической части при активном моменте сопротивления РОМ
Графики МХ АД и РОМ имеют две точки пересечения: a и b. Можно показать, что точка a – точка устойчивого режима работы, а точка b – неустойчивого. Это означает, что при небольших отклонениях координат системы от координат точки a система возвращается через некоторое время в исходное состояние, а при небольших отклонениях координат системы от координат точки b происходит переход системы либо в точку a, либо в - ∞.
Рассмотрим более сложный случай расчета установившегося режима. Допустим, что на валу действует момент сухого трения. Полагаем, что двигатель – асинхронный. МХ двигателя и РОМ представлены на рисунке 8.
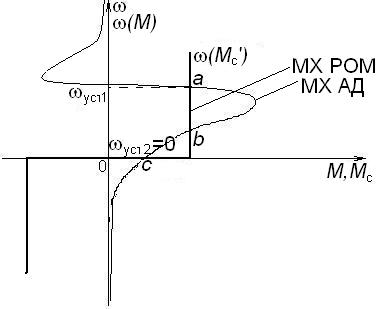
Рисунок 8- Графо-аналитический расчет установившегося режима работы механической части при воздействии момента сухого трения
В данном случае имеются три точки пересечения графиков: a, b, c. Можно показать, что точки a и c являются точками устойчивого равновесия, а точка b – неустойчивого. В этой ситуации двигатель будет либо нормально работать, приводя в движение нагрузку с угловой скоростью  , либо остановится и будет за счет сухого трения находится в неподвижном состоянии, т.е. работать с
, либо остановится и будет за счет сухого трения находится в неподвижном состоянии, т.е. работать с  . При этом на валу будет действовать ненулевой момент
. При этом на валу будет действовать ненулевой момент  , значение которого зависит от вида МХ асинхронного двигателя.
, значение которого зависит от вида МХ асинхронного двигателя.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 411; Нарушение авторских прав?; Мы поможем в написании вашей работы!