КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод тяжелого шарика
|
|
|
|
МЕТОД НАИСКОРЕЙШЕГО СПУСКА
Основным недостатком градиентного метода является необходимость частого вычисления производннх от R(х). Этого недостатка лишен метод наискорейшего спуска, который заключается в следующем.
В текущей точке вычисляется grad R(х), и затем в направлении градиента ищется тinR(х). Практически зто может быть осуществлено любым методом одномерной оптимизации (поиск по одному направленню — направленню градиента), наиболее часто используется сканирование до первого локального минимума по направлению grad R(х).
В результате вдали от оптимума эффективность метода повышается, мы быстреє попадаем в район оптимума, в окрестности которого зффективность метода снижается из-за частой смены направлення поиска й приближается к зффективности метода градиента.
Метод, как и все градиентные метод, обладает невьісокой зффективностью в овражньїх функциях. В ряде случаев можно повисить скорость вихода в район оптимума предьявлением невисоких требований к точности поиска шіп по направлению (задается величиной h — шагом поиска по направлению).
Условием окончания может являться малость модуля градиента R(х) |gгаd R(x)|< e. Можно также использовать и малость приращений по переменннм в результате шага, но только в том случае, если на данном шаге мы "проскочили" оптимум, иначе может сказаться, что малость шага обусловлена не близостью к оптимуму, а малостью коэффициента пропорциональности шага h.
В ряде случаев используют уменьшение шага поиска оптимума по направлению после каждой смены направлення. Это позво-ляет с большей точностью каждьій раз находить оптимум, но рез-ко снижает зффективность поиска в овражньїх функциях. Метод используется для локализации "дна оврага" в специальньїх овражньїх методах. Условием окончания поиска в зтом случае является достижение заданной малой величини шага.
Одна из возможнмх траекторий поиска минимума двумерной функции методом наискорейшего спуска приведена на рис. 17.
Метод базируется на аналогии с движением "тяжелого" материального шарика по наклонной поверхности. Скорость шарика при движении вниз будет возрастать, и он будет стремиться занять нижнее положение, т.е. точку минимума. При выводе дифференциального уравнения движения шарика учитывается его масса и вязкость среды, которые влияют на характер его движения, т.е. поиска min R(x).
В дискретном варианте траектория поиска описывается следующим алгоритмом:

При a = 0 метод превращается в обыкновенный градиентный. При a = 1 поиск не затухает, следовательно, при 0 < a < 1 можно получать различную эффективность метода, которая будет зависеть и от h. Вдали от оптимума поиск будет ускоряться, а вблизи возможны колебания около точки min R(x).
К недостаткам метода относится необходимость задания сразу двух неформальных параметров, определяющих эффективность поиска. К достоинствам метода, помимо ускорения движения вдали от оптимума, относится возможность "проскока" мелких локальных "ямок" (минимумов) за счет "инерционности шарика", т.е. можно решать и задачу глобальной оптимизации для функции R(x) с одним явно выраженным минимумом и многими "мелкими".
Одна из возможных траекторий поиска минимума двумерной функции методом тяжелого шарика приведена на рис. 17.
МНОГОМЕРНАЯ БЕЗГРАДИЕНТНАЯ ОПТИМИЗАЦИЯ
В данном разделе рассматриваются численные методы оптимизации, у которых величина и направление шага к оптимуму формируются однозначно по определенным детерминированным функциям в зависимости от свойств критерия оптимальности в окрестности текущей точки без использования производных (т.е. градиента). Все алгоритмы имеют итерационный характер и выражаются формулой

Основная особенность рассматриваемой группы методов — отсутствие вычисления градиента критерия оптимальности. Ряд методов прямого поиска базируется на последовательном применении одномерного поиска по переменным или по другим задаваемым направлениям, что облегчает их алгоритмизацию применение. Как и для градиентных методов, на рис.18 приводятся лишь по одной из возможных траекторий поиска каждым из ниже рассматриваемых методов. Кроме того, также для всех приведенных траекторий выбраны различные начальные условия, с тем чтобы не загромождать построения.
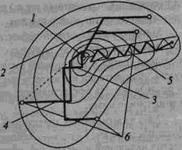
Рис. 18. Иллюстрация траекторий поиска минимума функции безградиентными детерминированными методами: 1 — оптимум; 2 — траектория метода параллельных касательных; 3 — траектория метода Гаусса — Зайделя; 4 — траектория метода Розенброка; 5 — траектория симплексного метода; 6 — начальные точки поиска
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 2253; Нарушение авторских прав?; Мы поможем в написании вашей работы!
