КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Видовое преобразование
|
|
|
|
Для выполнения видовых преобразований должны быть заданы точка наблюдения, совпадающая с глазом, и объект. Желательно, чтобы система мировых координат была правой. Будет удобно, если начало ее координат располагается где-то вблизи центра объекта, поскольку объект наблюдается в направлении от Е к О. Предположим, что это условие выполняется. На практике это означает, что, возможно, потребуется некоторое преобразование координат, заключающееся в вычитании из исходных значений координат положения центральной точки объекта. Это очень простое преобразование будет включено в программу, но без записи в математической форме. Пусть точка наблюдения Е будет задана в сферических координатах r, q, j по отношению к мировым координатам. То есть мировые координаты могут быть вычислены по формулам:
xE = psinjcosq
yE = psinjcosq (2.1)
zE = pcosj
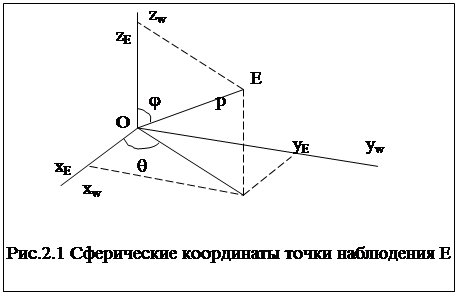 |
Обозначения сферических координат схематически изображены на рис. 2.1. Говорят, что вектор направления ЕО (равный -ОЕ) определяет направление наблюдения. Из точки наблюдения Е можно видеть точки объекта только внутри некоторого конуса, ось которого совпадает с линией ЕО, а вершина -— с точкой Е. Если заданы ортогональные координаты xE,yE,zE, точки Е, то можно вычислить ее сферические.
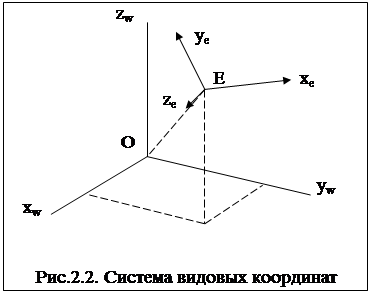 |
Нашей конечной задачей будет вычисление экранных координат X, У, для которых оси Х и У лежат в плоскости экрана, расположенной между точками Е и О и перпендикулярной направлению наблюдения EО. Начало системы видовых координат располагается в точке наблюдения Е (рис.2.2). При направлении взгляда из Е в О положительная полуось хe направлена вправо, а положительная полуось уe - вверх. Такое направление осей позволит нам впоследствии определить экранные оси в тех же направлениях. Направление оси ze выбирается таким образом, что значения координат увеличиваются по мере удаления от точки наблюдения. Такие определения осей логичны и удобны, но их взаимное соответствие таково, что система видовых координат является левосторонней. Хотя такой вывод может показаться несуразным, но это совершенно обычная ситуация в машинной графике и не вызовет появления каких-либо проблем. (Заметим, что система мировых координат всегда выбирается как правосторонняя.)
Видовое преобразование может быть записано в форме
[xeyeze1]=[xwywzw1] (2.2)
где V-матрица видового преобразования размерами 4 х 4. Для нахождения матрицы V предположим, что преобразования отображения могут быть составлены из четырех элементарных преобразований, для которых легко написать свои матрицы преобразований. Матрица V получается путем перемножения этих четырех матриц. Фактически каждое из четырех преобразований изменяет координаты и, следовательно, определяется матрицей, обратной матрице, соответствующей преобразованию точки.
Перенос начала из О в Е
Выполним такой перенос системы координат, при котором точка Е становится новым началом координат. Матрица для такого изменения координат выглядит так:
é 1 0 0 0ù
| 0 1 0 0 |
T = | 0 0 1 0| (2.3)
ë -xE -yE -zE 1û
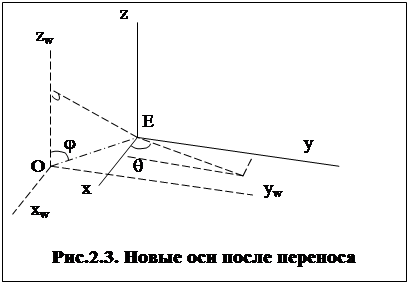 |
Новая система координат показана на рис.2.3.
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 660; Нарушение авторских прав?; Мы поможем в написании вашей работы!