КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тангенциальная составляющая ускорения
|
|
|
|
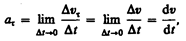
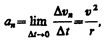
т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
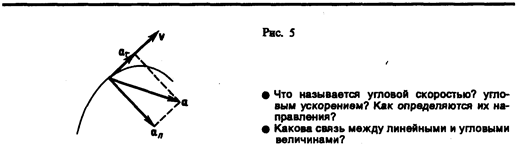
Найдем вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому D s можно считать дугой окружности некоторого радиуса r, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и EAD следует D vn / AB = v1/r, но так как AB = v D t, то

В пределе при  получим
получим  .
.
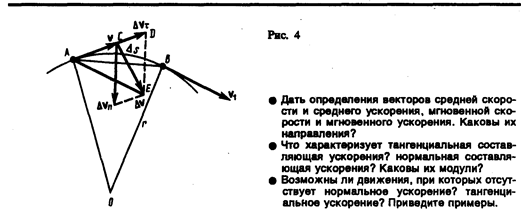
Поскольку , угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между v и Dv n стремится к прямому. Следовательно, при векторы Dv n и v оказываются взаимно перпендикулярными. Tax как вектор скорости направлен по касательной к траектории, то вектор Dv n, перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис.5):

Итак, тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения — быстроту изменения скорости по направлению (направлена к центру кривизны траектории).
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1)  , аn = 0 — прямолинейное равномерное движение;
, аn = 0 — прямолинейное равномерное движение;
2)  , аn = 0 — прямолинейное равнопеременное движение. При таком виде движения
, аn = 0 — прямолинейное равнопеременное движение. При таком виде движения
Если начальный момент времени t 1=0, а начальная скорость v 1 =v 0, то, обозначив t 2 =t и v 2 =v, получим  , откуда
, откуда

Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t, найдем, что длина пути, пройденного точкой, в случае равнопеременного движения
3)  , аn = 0— прямолинейное движение с переменным ускорением;
, аn = 0— прямолинейное движение с переменным ускорением;
4) , аn = const. При скорость по модулю не изменяется, а изменяется по направлению. Из формулы an=v 2 /r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;
5) ,  — равномерное криволинейное движение;
— равномерное криволинейное движение;
6)  , — криволинейное равнопеременное движение;
, — криволинейное равнопеременное движение;
7) , — криволинейное движение с переменным ускорением.
§ 4. Угловая скорость и угловое ускорение
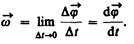
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис. 6). Ее положение через промежуток времени D t зададим углом D  . Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются
. Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются  или
или  ). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняется правилу правого винта (рис.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняется правилу правого винта (рис.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
Вектор  направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w =T– 1, а ее единица — радиан в секунду (рад/с).
направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w =T– 1, а ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)

т. е.

В векторном виде формулу для линейной скорости можно написать как векторное произведение:

При этом модуль векторного произведения, по определению, равен  , а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если ( = const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени D t = T соответствует
= const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени D t = T соответствует  = 2p, то = 2p/ T, откуда
= 2p, то = 2p/ T, откуда

Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:

откуда

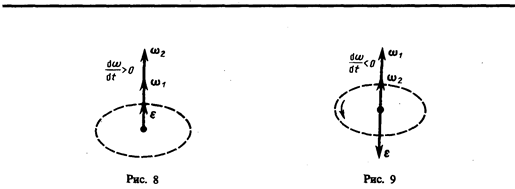
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор  сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
Тангенциальная составляющая ускорения 
Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение  , нормальное ускорение
, нормальное ускорение  ) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:
) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:

В случае равнопеременного движения точки по окружности (e=const)

где w0 — начальная угловая скорость.
|
|
|
|
|
Дата добавления: 2014-11-07; Просмотров: 967; Нарушение авторских прав?; Мы поможем в написании вашей работы!