КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости с ориентацией по потокосцеплению ротора
|
|
|
|
Для того чтобы асинхронный электропривод по своим регулировочным свойствам был аналогичен двигателю постоянного тока, он должен иметь линейные механические характеристики и математическое описание, соответствующее линейному динамическому звену.
Для определения условия, необходимого для линеаризации механических характеристик, воспользуемся формулами для мощности потерь и момента двигателя:
 ;
;  .
.
Подставив в него выражение для абсолютного скольжения ротора 
 ,
,
где  и другие величины с таким обозначением - относительные значения скоростей,
и другие величины с таким обозначением - относительные значения скоростей,  - скорость вращения магнитного поля статора при номинальной частоте питания, а
- скорость вращения магнитного поля статора при номинальной частоте питания, а  - то же, но при произвольном значении частоты питания, получим выражение для механической характеристики асинхронного двигателя в таком виде:
- то же, но при произвольном значении частоты питания, получим выражение для механической характеристики асинхронного двигателя в таком виде:
 .
.
Первая составляющая, соответствующая скорости вращения магнитного поля статора , т.е. частоте питания и числу пар полюсов  , аналогична скорости идеального холостого хода двигателя постоянного тока. Вторая составляющая определяет статическое падение скорости, т.е. наклон механической характеристики. Только при Ψ2 = const он постоянен и пропорционален активному сопротивлению обмотки ротора R2 как у двигателя постоянного тока, что подтверждает идентичность их характеристик (рис.2.1). Следовательно, задача линеаризации сводится к выполнению условия Ψ2 = const.
, аналогична скорости идеального холостого хода двигателя постоянного тока. Вторая составляющая определяет статическое падение скорости, т.е. наклон механической характеристики. Только при Ψ2 = const он постоянен и пропорционален активному сопротивлению обмотки ротора R2 как у двигателя постоянного тока, что подтверждает идентичность их характеристик (рис.2.1). Следовательно, задача линеаризации сводится к выполнению условия Ψ2 = const.
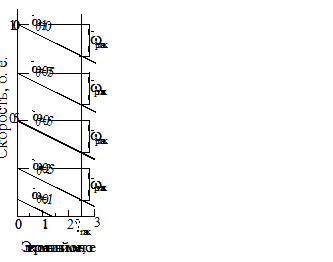
Рис.2.1. Механические характеристики при Ψ2 = const.
Другая особенность асинхронного двигателя – наличие перекрестных связей в его структурной схеме, из-за чего он представляется нелинейным динамическим звеном, а это в свою очередь приводит к неизбежному усложнению системы управления. Если бы по своей структуре он был аналогичен двигателю постоянного тока, то для него можно было бы использовать хорошо отработанные для последних методы, в частности подчиненного управления. Таким образом, вторая задача ориентирована на улучшение динамических характеристик приводов с асинхронными двигателями.
Для достижения поставленной цели необходимо решить следующие задачи:
1. Стабилизировать величину одной из электромагнитных переменных выражения для момента, лучше всего наиболее инерционную – потокосцепление ротора, т.к. при этом учитывается не только ток ротора, но и его фазовый сдвиг.
2. Организовать управление током статора, обеспечивающее оптимальное формирование электромагнитного момента двигателя.
От того, насколько точно эти задачи решаются, зависит качество работы системы управления и привода в целом. Повышенные требования естественно влекут за собой усложнение системы управления или использование определенных типов двигателей, обязательную установку датчиков скорости или угла поворота и других мероприятий.
Обе задачи решаются при использовании систем управления, называемых у нас векторными, а в зарубежной литературе - системами управления полем
(FC – Flux Control). Использование термина векторное управление связано с тем, что потокосцепление ротора Ψ2 не может быть измерено непосредственно и рассчитывается по моделям двигателя, построенным на векторном описании процессов. Эти модели весьма разнообразны, и выбор ее той или иной фирмой неизвестен. Общее для них состоит в том, что задается и поддерживается постоянное потокосцепление ротора, но реализуется эта операция по-разному.
Так например, в документации фирмы SEW-EURODRIVE в зависимости от способа управления различают системы управления полем ротора с управлением напряжением (Voltage) - VFC или током (Current) - СFC. Принципиальное отличие обоих способов состоит в том, что в первом случае рассчитывается и задается амплитуда напряжения статора, а во втором – текущие значения и фазы токов обмоток статора. В установившихся режимах оба способа управления равноценны, но в динамике – при ступенчатом набросе нагрузки – управление СFC позволяет уменьшить величину и время динамической ошибки. Выигрыш во времени объясняется тем, что при задании амплитуды напряжения нарастание тока и момента двигателя зависят от инерционности обмоток статора и ротора, а при формировании тока обмотки статора ее инерционность компенсируется. Однако более существенное достоинство режима СFC состоит в том, что задание тока статора при поддержании постоянства потокосцепления ротора означает задание момента двигателя. Таким образом, в режиме СFC возможно регулирование не только скорости, но и момента.
При векторном управлении обязательным условием является наличие информации о текущем значении скольжения. В приводах с датчиком скорости она получается в контуре скорости сравнением заданного и текущего значений скорости. Этот вариант наиболее точный и потому предпочтительный. В тех случаях, когда установка датчика по тем или иным причинам не возможна, используются бездатчиковые системы управления, в которых скольжение также рассчитывается по моделям двигателя, построенным на векторном описании процессов.
Векторное управление базируется на математическом описании двигателя в операторной форме и представлении его в виде структурных схем. Поэтому прежде чем перейти к его изучению необходимо рассмотреть используемые подходы к такому математическому описанию асинхронного двигателя.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1115; Нарушение авторских прав?; Мы поможем в написании вашей работы!