КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы построения систем векторного управления [Л.1: 6.3]
|
|
|
|
В предыдущих разделах были рассмотрены положения математического аппарата,
используемого при реализации систем векторного управления, а также структурные схемы с произвольной ориентацией вращающейся системы координат (α – β) и с ее ориентацией по вектору потокосцепления ротора Ψ2 (d-q). Структурные схемы построены по проекциям векторов переменных, которые представляются действительными числами, наиболее пригодными для вычислений, что значительно упрощает процедуру вычислений.
Однако для рассмотрения принципов построения и технической реализации систем векторного управления необходимо обсудить еще, по крайней мере, два вопроса: способы стабилизации потокосцепления ротора Ψ2 и преобразования координат.
Способы стабилизации потокосцепления ротора Ψ2
Улучшение динамических свойств привода с векторным управлением асинхронным двигателем может быть достигнуто, если обеспечить постоянство Ψ2 не только в статических, но и в динамических режимах. Для стабилизации какой-либо переменной обычно создается замкнутый контур с заданием и измерением регулируемой величины. Однако измерить потокосцепление ротора непосредственно практически не возможно, и поэтому информацию о Ψ2 можно получить только другими способами, соответственно которым существующие системы векторного управления делятся на системы с прямой и косвенной ориентацией по полю.
В системах с прямой ориентацией полученная тем или иным способом информация о потокосцеплении Ψ2 используется для организации контура потока и его стабилизации.
По способу получения информации о потоке Ψ2 имеется две разновидности систем:
1) вычисление потока Ψ2 по модели двигателя; 2) измерение главного потока Ψm с помощью датчиков, установленных в воздушном зазоре, и затем расчет по нему Ψ2.
|
|
|
На рис.8 приведены структурные схемы привода с прямой и косвенной ориентацией по полю, на которых двигатель М представлен в виде математической модели в системе координат α- β. Так же представлен и преобразователь частоты ПЧ с инвертором, управля-емым током i1. На рис.8,а показана структура привода, поясняющая принцип векторного управления с прямой ориентацией и расчетом потокосцепления Ψ2по модели двигателя.
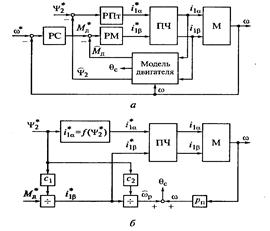
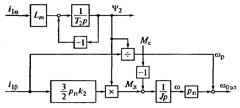
Рис.7. Структурная схема двигателя с
управлением током статора
Значком * помечены сигналы задания, а значком ^ - величины, определяемые в модели. Сигналами задания ПЧ служат  и
и  - проек-ции вектора тока статора на оси вращающейся системы координат, поступающие с регулято- Рис.8. Структура привода с прямой и кос-
- проек-ции вектора тока статора на оси вращающейся системы координат, поступающие с регулято- Рис.8. Структура привода с прямой и кос-
оров потока (РПт) и момента (РМ). В модели венной ориентацией по потокосцеплению
двигателя (рис.6) по истинным значениям проекций тока i1α и i1β и значению скорости двигателя рассчитываются значения момента  и потокосцепления ротора
и потокосцепления ротора  . Там же рассчитывается мгновенное значение угла поворота θС вращающейся системы координат α- β относительно неподвижной x-y. Угол θС используется в дальнейшем в преобразователе координат (на схеме не показан). Рассчитанное значение потокосцепления ротора
. Там же рассчитывается мгновенное значение угла поворота θС вращающейся системы координат α- β относительно неподвижной x-y. Угол θС используется в дальнейшем в преобразователе координат (на схеме не показан). Рассчитанное значение потокосцепления ротора  сравнивается с сигналом задания
сравнивается с сигналом задания на входе регулятора потока (РПт), а момент двигателя - с сигналом задания момента
на входе регулятора потока (РПт), а момент двигателя - с сигналом задания момента  на входе регулятора момента (РМ). Контур регулирования момента является внутренним по отношению к внешнему контуру скорости с регулятором скорости (РС).
на входе регулятора момента (РМ). Контур регулирования момента является внутренним по отношению к внешнему контуру скорости с регулятором скорости (РС).
Сигнал заданиявычисляется по номинальным и обмоточным данным двигателя. Из этого следует, что высокое качество работы системы может быть достигнуто только при наличии достоверной и полной информации о двигателе.
|
|
|
Сигнал задания по моменту является выходным сигналом контура скорости, поэтому его значение формируется регулятором скорости на уровне, необходимом для обеспечения требуемой точности стабилизации скорости в заданных диапазонах регулирования скорости и изменения нагрузки.
Рассмотренный принцип построения систем векторного управления - наиболее распространенный в выпускаемых промышленностью преобразователях частоты.
Система управления с измерением потока Ψm была разработана в конце 60-х годов ХХ века фирмой Siemens [Л.1:7.3]. Измерение магнитного потока производилось с помощью двух датчиков Холла, установленных в зазоре двигателя. Датчики сдвинуты в плоскости поперечного сечения двигателя на 90 эл. град, один из них ориентирован по оси х. Благодаря этому выходные напряжения датчиков представляют собой проекции вектора главного потокосцепления Ψmх и Ψmу на оси неподвижной системы координат х-у. Проекции вектора потокосцепления ротора Ψ2 х и Ψ2у, необходимые для построения системы управления, рассчитывались по выражениям:
Ψ2х = Ψmх /(к2 – L 2σ i1х); Ψ2у = Ψmу /(к2 – L 2σ i1у).
Это была первая промышленная векторная система регулирования скорости асинхронного двигателя (Transvektor) и долгое время единственной. Ее основной недостаток – обязательное оснащение двигателя датчиками потока, что исключало возможность использования любых асинхронных двигателей и определило ее ограниченное применение. Однако разработанный принцип управления стал основой для построения всех систем векторного управления, выпускаемых и в настоящее время.
В системах с косвенной ориентацией по полю (рис. 8,б) поток Ψ2 не измеряется и не рассчитывается, а формируется путем задания других переменных. Требуемые сигналы задания составляющих тока статора формируются на основании заданных значений потокосцепления и момента (внешний контур скорости, аналогичный контуру с регулятором РС на рисунке 8,а, имеется, но на рис. 8,б не показан).
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1160; Нарушение авторских прав?; Мы поможем в написании вашей работы!