КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости двигателя постоянного тока
|
|
|
|
Лекция 19. Основные уравнения ДПТ независимого возбуждения
1. Уравнение баланса напряжений в цепи якоря (см. (17.10) имеет вид
Ея = Uс – Iя(Rд + Rп + Rя), (18.1)
При работе (Rп= 0) уравнение баланса напряжений в цепи якоря будет иметь вид
Ея = Uс– Iя(Rд+ Rя). (18.2)
2. Уравнение электромагнитного момента имеет вид Мя= сФIя. (18.3)
3. Уравнение ЭДС в обмотке якоря имеет вид Е=сФω. (18.4)
4. Закон Ома для магнитной цепи выражается формулой  , (18.5)
, (18.5)
где Fн= WвIв (намагничивающая сила обмотки возбуждения); Rм – магнитное сопротивление участка магнитной цепи, по которому замыкается магнитный поток Ф.
 . (18.6)
. (18.6)
Из выражения (18.4) получим
 . (18.7)
. (18.7)
Обозначим  ;
;  ; (18.8–18.9)
; (18.8–18.9)
 ; (18.10)
; (18.10)
 , (18.11)
, (18.11)
где  и Iя – являются переменными; А и В – коэффициенты.
и Iя – являются переменными; А и В – коэффициенты.
Следовательно, уравнение  , то есть зависимость
, то есть зависимость  является прямой линией (рис. 18.1).
является прямой линией (рис. 18.1).
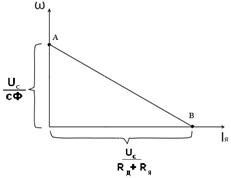
Рис.18.1. График функции
В точке В скорость  = 0,
= 0,  .
.
В точке А ток Iя= 0,  .
.
Зависимость (18.11) и рис. (18.1) представляют собой электромеханическую характеристику двигателя постоянного тока независимого возбуждения, т.к. – механическая величина, а IЯ – электрическая величина.
Из уравнения (18.10) видно, что скорость ДПТ можно изменять:
1) путем изменения UС, такое регулирование скорости называется якорным регулированием.
2) путем изменения магнитного потока Ф, такое регулирование скорости называется полюсное регулирование.
3) путем изменения добавочного сопротивления RД – реостатное регулирование.
Рассмотрим подробнее эти способы.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 443; Нарушение авторских прав?; Мы поможем в написании вашей работы!