КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример решения задачи №3
|
|
|
|
Определить условия абсолютной устойчивости нелинейной системы, используя критерий абсолютной устойчивости В.М. Попова. j e
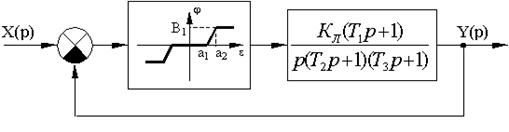
Рис. 14
Кл = 5; Т1=0,5 с; Т2 = 2,5 с; Т3 = 5с; В = 1; а1 = 0,5; а2 = 1;
Для определения устойчивости необходимо построить видоизмененную частотную характеристику линейной части системы, т.к. уравнение, по которому судят об устойчивости, имеет следующий вид:
Re[П(jw)] = Re[(1+jwq)Wлч(jw) + 1/k1] > 0,
а нелинейность должна удовлетворять условиям
 ; j(0) = 0 – проходит через начало координат и располагается в некотором угле, ограниченном осью абсцисс и линией
; j(0) = 0 – проходит через начало координат и располагается в некотором угле, ограниченном осью абсцисс и линией  (Гурвицев угол).
(Гурвицев угол).
Для данной нелинейности k = tg(B/a2) = tg (1/1) = 1.
Re[П(jw)] = Re[Wлч(jw)+q jwIm[Wлч(jw)]] = X – qY,
где – X = Re[Wлч (jw)], Y = wIm[Wлч (jw)].
Видоизмененная частотная характеристика
W*(jw) = Re[Wлч (jw)] + jwIm[Wлч (jw)]
Определим выражение для комплексного коэффициента передачи линейной части системы.
Wлч (jw) =  =
=  =
=
=  – j
– j = Re(w) – jIm(w).
= Re(w) – jIm(w).
Тогда видоизмененная частотная характеристика
W*(jw) = – j
– j = Re*(w) – j Im*(w)
= Re*(w) – j Im*(w)
Подставляя числовые данные получим:
W*(jw) =  - j
- j 
Расчетные данные занесем в таблицу №12 и строим график (рис. 15.)
Таблица №12
| w | 0,1 | 0,25 | 0,5 | 2,5 | ||||
| Re* | -35,000 | -26,588 | -10,370 | -2,304 | -0,351 | -0,037 | -0,008 | -0,002 |
| Im* | -5,000 | -3,435 | -0,636 | 0,320 | 0,206 | 0,043 | 0,011 | 0,003 |
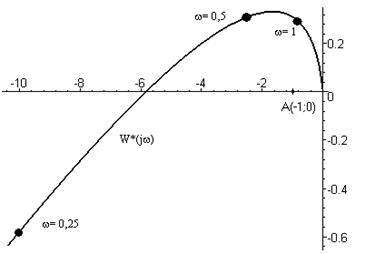
Рис. 15
tg(α) = В / а2 = 1/1 = 1 = К1.
Точка А, характеризующая Гурвицев угол, в который должна вписываться нелинейность, соответствует координате А(-1/К1, 0). Если через эту точку можно провести прямую так, чтобы видоизмененная частотная характеристика вся лежала справа от нее, то система абсолютно устойчива. В нашем случае это сделать невозможно.
Т.к. W*(jw) пересекает отрицательный отрезок вещественной оси при значении Re(w)=–5.8, то можно вычислить критическое значение коэффициента К = tg a, ограничивающее Гурвицев угол:
 ,
,  .
.
 |
Если нелинейность впишется в угол, образованный осью ОХ и линией 0,172х=y, то САУ будет устойчива.
В нашем случае нелинейность не вписывается в этот угол, значит, при заданной нелинейности и заданных параметрах линейной части она абсолютно неустойчива.
В нашем случае нелинейность не вписывается в этот угол, значит, при заданной нелинейности и заданных параметрах линейной части она абсолютно неустойчива.
Литература
1. Уразаков К.Р., Андреев В.В., Жулаев В.П. Нефтепромысловое оборудование для кустовых скважин.- М.: Недра, 1999.- С. 80-81.
2. Пат. 2145414 РФ, МПК G 01 L 1/22. Тензорезисторный датчик силы / УППО / Свирский В.В., Мамлеев Р.Ф. // Опубл. 2000.02.10.
3. Хакимьянов М.И., Штанев С.Л. Оценка погрешности датчика усилия
ДДС-04 при смещении направления и точки приложения нагрузки // МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ В СИСТЕМАХ КОНТРОЛЯ И УПРАВЛЕНИЯ: Труды международной научно-технической конференции (Россия, Пенза, 9-10 сентября 2002 г.) / Под ред. М.А. Щербакова.- Пенза: Информационно-издательский центр Пенз. гос. ун-та, 2002.- С. 165-167.
4 Хакимьянов М.И., Ковшов В.Д., Штанев С.Л. Анализ упругих элементов атчиков усилия систем динамометрирования ШГН. «Датчики и преобразователи информации систем измерения, контроля и управления». Сборник материалов XIV Научно-технической конференции с участием зарубежных специалистов. Под редакцией профессора В.Н. Азарова. М.: МГИЭМ, 2002.- С.: 132-133.
5. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин (Измерительные преобразователи): Учеб. пособие для вузов.- Л.: Энергоатомиздат. Ленингр. отд-ние, 1983.- С. 92-106.
6. Cистема динамометрирования стационарная ДДС-04 (динамограф) // http://www.grant-ufa.ru/dds-04.shtml.
7. Чаронов В.Я. Автоматизация работы основного оборудования и проблемы энергосбережения на объектах нефтегазодобычи.- Альметьевск: Изд-во АО «Татнефть», 1998.- 330 с.
8. Жук Е., Шимчак П. Система Lufkin Automation контролирует работу скважин в Беларуси // Нефть и газ Евразия.- 2006.- № 8. С.: 16-27.
9. Ковшов В.Д., Емец С.В., Хакимьянов М.И., Светлакова С.В. Датчики усилия для систем динамометрирования штанговых глубинных насосов добычи нефти // Электронный журнал "Нефтегазовое дело", Уфа, 2007.
10. http://www.ogbus.ru/authors/Kovshov/Kovshov_1.pdf. 16 с.
11. Автоматическое регулирование. Теория и элементы систем: учебник для вузов / под ред. Н. Н. Иващенко – 3-е изд. – Москва: Машиностроение, 1973. – 606 с.
12. Анхимюк, В. Л. Теория автоматического управления: учебное пособие для вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев. – Минск: Дизайн ПРО, 2000. – 352 с.
13. Анхимюк, В. Л. Теория автоматического управления: учеб. пособие для электротехн. спец. вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев. – 3-е изд., перераб. и доп. – Минск: Высшая школа, 1979. – 352 с.
14. Бесекерский, В. А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. – Москва: Наука, 1966. – 992 с.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 709; Нарушение авторских прав?; Мы поможем в написании вашей работы!