КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Конструкция
|
|
|
|
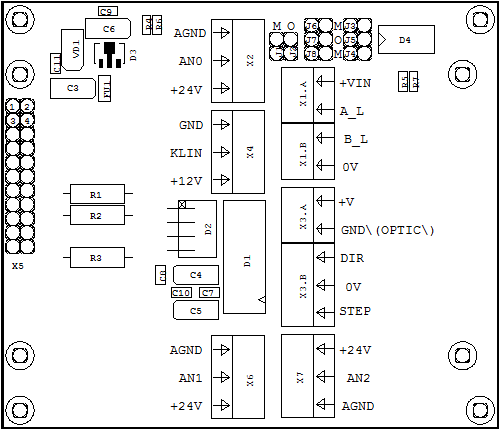
Контроллер размещен в герметичном прямоугольном корпусе из ударопрочного полистирола 165 х 120 х 60 мм. На боковых поверхностях размещены разъемы для подключения датчика веса, датчика положения клиньев, кабеля связи с системой сбора информации и гермоввод, через который пропущен кабель оптического датчика. Внутри корпуса смонтированы печатные платы микроконтроллера датчика глубины МГД 408-01 и кабельного ввода ПКВГ 4210-01.
Плата кабельного ввода предназначена для подключения внешних устройств к контроллеру. На ней установлены следующие компоненты:
- преобразователь питания на два напряжения (18-24 и 9-12 вольт), гальванически изолированный от питающего напряжения и предназначенный для питания токовых датчиков;
- модуль токовой защиты преобразователя;
- измерительные резисторы для получения сигнала с токовых датчиков;
- клеммные колодки для подключения кабелей;
- перемычки, задающие режимы работы платы.
Перемычки J1,J2 определяют напряжение питания, а J3-J6 определяют наличие гальванической развязки по входам датчика углового перемещения лебедки. Этот датчик подключается к разъемам X3.A,B. Конкретные схемы подключения и соответствующая им установка перемычек J1-J6 указана в описании на соответствующий датчик в данном Руководстве. Подключение производится кабелем, введенным в корпус контроллера через гермоввод.
Токовый датчик веса на крюке ДНК 311-03 подключается к разъему X6.
Токовый датчик положения клиньев ДПК 314-01А подключается к разъему X7, а дискретный (ДПК 314-01Д) – к X4. Подключение этих датчиков приведено в документации на соответствующие изделия и производится через герметичные разъемы, установленные на корпусе контроллера глубиномера.
Разъем X2 может быть использован для подключения токового датчика давления в манифольде. В текущей версии конструктивного исполнения глубиномера и конфигурации станции ГТИ эта возможность не используется.
К разъему X1.A, X1.B подключается кабель от системы сбора. К контактам 0V и VIN подключается соответственно нулевой и питающий проводники. К контактам A_L и B_L подключаются проводники витой пары интерфейса RS-485 соответственно RS485-A и RS485-B. Подключение производится через разъем, установленный на корпусе контроллера.
Алгоритм работы контроллера
Принцип работы контроллера основан на преобразовании угла поворота барабана буровой лебедки в пропорциональное количество импульсов с последующим пересчетом их в линейное перемещение талевого блока (бурильной трубы, квадрата и т.п.).
Датчик углового перемещения вала лебедки имеет двухфазный выходной сигнал, сформированный таким образом, чтобы фазовый сдвиг между импульсами составлял около 90 градусов, что позволяет определить направление вращения вала лебедки. При этом одна из фаз используется непосредственно для счета импульсов, другая – для определения направления перемещения.
Контроллер преобразует две последовательности импульсов в счетные импульсы и фиксирует направление вращения барабана. Количество счетных импульсов на полный оборот барабана равно удвоенному числу зубьев гребенки для оптического датчика и утроенному числу магнитов – для магнитного. Контроллер подсчитывает количество импульсов с учетом направления вращения барабана лебедки, а затем преобразует число импульсов в величину линейного перемещения талевого блока. Алгоритм расчета учитывает разницу длин окружностей отдельных слоев намотки каната. Для минимизации ошибки определения перемещения коэффициент пропорциональности зависит от количества слоев каната, оставшихся на лебедке. Для определения номера текущего слоя глубиномеру требуется сообщить раскладку каната (количество витков на нижнем слое), а также текущий номер слоя и количество витков каната, оставшихся на слое. Для определения положения талевого блока также требуется ввести перемещение талевого блока на один импульс датчика по слою, являющемуся базовым (цена импульса), и приращение цены импульса на один слой.
В состав микроконтроллера входит трехканальное АЦП, предназначенное для преобразования аналоговых сигналов от датчиков веса, давления и положения клиньев в цифровой код.
Данные о наличии или отсутствии давления в манифольде глубиномер может получать от системы сбора информации более высокого уровня.
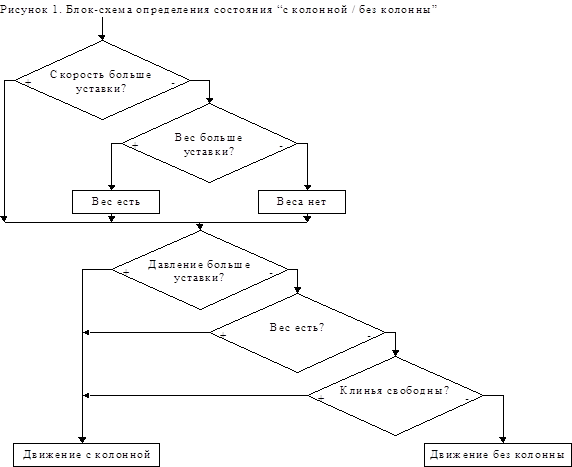
Наличие данных о давлении в манифольде, весе на крюке и положении клиньев позволяет распознавать ситуации:
· движение свободного талевого блока или талевого блока с буровой трубой;
· движение талевого блока вместе с буровой колонной.
Это дает возможность рассчитать дополнительные параметры:
· глубину забоя скважины;
· расстояние от забоя скважины до бурового инструмента;
· механическую скорость бурения.
Текущее положение талевого блока определяется глубиномером как сумма начального значения и приращений (с учетом направления) на каждый импульс датчика.
Положение инструмента над забоем определяется суммированием приращений с учетом направления изменения положения талевого блока при движении его с колонной. В момент нахождения инструмента на забое параметр “над забоем” равен нулю, при подъеме - увеличивается.
Глубина забоя определяется максимальным значением суммирования начального значения и изменения положения талевого блока при движении его с колонной вниз. Параметр “глубина забоя” увеличивается при движении талевого блока с колонной вниз при значении “над забоем”, равным нулю.
Алгоритм расчета этих величин не учитывает погрешность растяжения талевого каната под весом буровой колонны, и растяжения буровой колонны под собственным весом.
Таким образом, для правильной работы глубиномера необходимо сообщить ему:
1. пороговое значение скорости;
2. пороговое значение веса;
3. пороговое значение датчика клиньев (если для опроса его датчика используется канал АЦП);
4. пороговое значение давления;
5. раскладка каната на барабане (количество витков на нижнем слое);
6. цены импульса по каждому слою;
7. механические характеристики: направление вращения, считающееся положительным, и состояние датчика клиньев, в котором клинья подняты;
8. начальное положение талевого блока, текущий слой и виток;
9. текущую глубина забоя и расстояние от забоя до инструмента;
10. при проведении замеров периодически пересылать величину давления в манифольде от имеющегося в системе датчика давления, если датчик не подключен непосредственно к глубиномеру.
Скорость вращения лебедки измеряется как число импульсов датчика вращения, подсчитанное за 100 мс, умноженное на цену импульса текущего слоя.
Функциональная схема
Ядром системы обработки данных устройства является высокоскоростной микроконтроллер DS87C520.
Контроллер имеет аппаратные и программные средства поддержки канала связи с системой сбора информации более высокого уровня. Связь осуществляется по двухпроводной линии интерфейса RS485 «общая шина» с использованием логического уровня протокола HDLC (его подмножества SDLC).
Питание контроллера осуществляется по кабельной линии из системы сбора информации постоянным напряжением 9 – 12 вольт. Для повышения помехозащищенности питание контроллера и электронных схем первичных преобразователей имеет полную гальваническую развязку по сигнальным цепям и питанию, реализованную с использованием специализированных оптронов и преобразователей напряжения.
Оптический датчик углового перемещения лебедки
Оптический датчик углового положения вала буровой лебедки ОДИ 441-02 преобразует угол вращения вала датчика в две последовательности электрических импульсов, формируемые с фазовым сдвигом 90° относительно друг друга. Одна из этих последовательностей используется для вычисления угла поворота вала, другая - для определения направления вращения. Электронная часть датчика состоит из двух оптопар, смонтированных на печатной плате под определенным углом. Питание на оптопары (+5 в) поступает из блока контроллера по соединительному кабелю.
Конструктивно датчик размещен в металлическом корпусе цилиндрической формы, снабженным кронштейном для монтажа. На валу датчика установлен шкив с зубчатым венцом, имеющим 25 зубов. С помощью ременной передачи он связан со шкивом, смонтированным на валу буровой лебедки. Датчик монтируется в непосредственной близости от вала буровой лебедки на стойке, входящей в комплект поставки прибора.
Магнитный датчик углового перемещения лебедки
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 839; Нарушение авторских прав?; Мы поможем в написании вашей работы!