КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекція 2. Конструктивні особливості верстатів з ЧПУ 2 страница
|
|
|
|
• установка необхідної швидкості в межах заданого діапазону;
• стабілізація встановленого значення швидкості з заданою точністю при збурюючих впливах, наприклад зміні навантаження на валу двигуна;
• регулювання моменту, що розвивається двигуном в руховому і гальмівному режимах, і прискорення (уповільнення) приводу;
• регулювання динамічних характеристик - формування необхідного характеру зміни швидкості в часі п = / (/) із заданою точністю.
Діапазон регулювання швидкості визначається як відношення максимальної швидкості до мінімального: Б = птах / птИ.Для механізмів подачі I) = 10 ТОВ, для механізмів головного руху I) = 1 ТОВ. Для механізмів головного руху важливим є також діапазон регулювання швидкості при сталості потужності: БР = лтах / лном. Для сучасних верстатів з ЧПУ Ір = 4... 10. У цих відносинах ітах - найбільша допустима, а «ТШ - найменша допустима частота обертання валу двигуна, мін -1, при якій зберігаються параметри електроприводу, а також забезпечуються необхідні статичні характеристики; Лном - частота обертання для електроприводу постійного струму, хв-1, при харчуванні якоря номінальною напругою і кола збудження двигуна номінальним струмом при номінальному моменті навантаження або частота обертання для електроприводу змінного струму при живленні обмоток статора номінальною напругою як за величиною лінійної напруги, так і за частотою живлячої напруги при номінальному моменті навантаження. Динамічні характеристики електроприводів верстатів. Електроприводи мають можливість налаштування регуляторів для отримання наступних динамічних характеристик при відпрацюванні керуючого впливу (пуск, гальмування, реверс, перехід з однієї швидкості на іншу):
апериодический процес;
коливальний процес з перерегулюванням за швидкістю не більше 20%; 8 -подібний процес з малим прискоренням на початку (при рушанні) і в кінці (при зупинці) перехідного процесу при лінійному характері зміни швидкості на більшій частині динамічного процесу.
Електроприводи головного руху повинен забезпечувати час повернення швидкості не більше 1 с при ступінчастому зміні навантаження від сили струму холостого ходу до номінального значення сили струму для частоти обертання не нижче номінальної. При цьому величина максимального динамічного зниження швидкості повинна бути не більше 20%. Смуга пропускання частот замкнутого контуру регулювання частоти обертання при відсутності додаткового моменту інерції на валу двигуна і амплітуді керуючого сигналу не більше 0,1 В повинна бути не менше 20 Гц для електроприводу головного руху, не менше 30 Гц для тиристорних електроприводів подачі і не менше 100 Гц для транзисторних електроприводів подачі.Смугою пропускання частот замкнутого контуру вважається діапазон частот, у якому зсув по фазі перших гармонік сигналів зворотного зв'язку по частоті обертання і керуючого сигналу не перевищує 90 ел. град, або в якому зниження амплітуди вихідного сигналу не більше 3 дБ. Експериментально смуга пропускання частот замкнутого контуру визначається таким чином: на вхід системи подається синусоїдальний керуючий різночастотних сигнал з амплітудою 0,1 В. Смугою пропускання вважається максимальна частота керуючого (вхідного) сигналу, при якій виконуються умови щодо зрушення фази і зниження амплітуди вихідного сигналу, відмічені раніше.Смуга пропускання частот замкнутого по положенню контуру регулювання при роботі приводу в лінійній зоні повинна бути не менше 5 Гц для тиристорних електроприводів подачі і не менше 20 Гц для транзисторних електроприводів подачі.Електроприводи верстатів забезпечують наступні режими робіт: тривалий (режим S1);
короткочасний (режим S2);
повторно- короткочасний (режим S3);
повторно- короткочасний з частими реверсами (режим S7).
Зв'язок пристрої ЧПУ з електроприводом. Значення швидкості повинно бути пропорційно значенню вхідного аналогового сигналу, що надходить від пристрою ЧПУ. Вхідний аналоговий сигнал завдання швидкості може приймати будь-які значення в межах від -10 В до +10 В (напрузі ± 10 В відповідає максільний значення швидкості). Напрямок обертання визначається полярністю вхідного аналогового сигналу. В електроприводі передбачені обмінні сигнали з системою управління верхнього рівня (з системою ЧПУ), наприклад надходять команди від системи ЧПУ крім вхідного аналогового сигналу завдання швидкості і напряму обертання - розблокування приводу (дозвіл роботи); екстрена (аварійна) зупинка (блокування) приводу; зовнішнє обмеження крутного моменту (сили струму); перехід на «повзучу» швидкість (тільки для головного приводу); від приводу в систему ЧПУ верстата - готовність до роботи (справний стан приводу); відповідність дійсної швидкості заданої (п = п ^); досягнення мінімальної швидкості (л < птИ); інформація про фактичному значенні крутного моменту (сили струму); від приводу зі зворотним зв'язком по положенню (автономного) додатково до перерахованих командам в систему управління верстатом надходять команди про відпрацювання заданого переміщення і про неприпустимою величиною похибки по положенню. Так як існують позиційні та контурні пристрої ЧПУ, у верстатах застосовуються відповідно позиційні і стежать електроприводи.Особливості електроприводів подачі. Будучи одним з основних вузлів, електроприводи подачі визначають точність і продуктивність верстатів з ЧПУ. У зв'язку з тим, що пристрій ЧПУ практично безінерційний формує сигнали управління приводом як в режимі руху по заданій траєкторії, так і в режимі позиціонування (зупинки в заданій координаті), вирішальне значення для забезпечення точності мають характеристики і параметри приводу подачі з урахуванням особливостей кінематичного ланцюга приводу.У міру вдосконалення пристроїв ЧПУ, підвищення точності датчиків положення, збільшення жорсткості і точності механічних вузлів верстата підвищуються вимоги до швидкодії і точності приводів подачі. Слід виділити три типи електроприводів, розроблених спеціально для механізмів подачі верстатів з ЧПУ:
• електроприводи постійного струму з високомоментними двигунами, що мають збудження від постійних магнітів;
• електроприводи змінного струму з синхронними (вентильними) двигунами, що мають ротор з постійними магнітами;
• електроприводи змінного струму з асинхронними двигунами, що мають короткозамкненим обмотку ротора.
Порівняння приводів подачі зазначених трьох типів показує наступне:
• електроприводи постійного струму через наявність у них двигуна постійного струму зі складним і малонадійним щітково - колекторним вузлом поступаються за точністю, швидкодії і надійності іншим двом типам приводу;
• електроприводи з синхронними (вентильними) двигунами мають найкращі технічні характеристики;
• електроприводи з асинхронними двигунами також відносяться до найбільш перспективним.
Асинхронні двигуни, незначно поступаючись синхронним (вентильним) двигунам по габаритними показниками, мають значно нижчі вартість і трудомісткість виготовлення. В асинхронних двигунах використовується значно дешевша в порівнянні з синхронними і технологічна короткозамкнутая обмотка ротора (у синхронних двигунах використовується ротор з дорогими магнітами з рідкоземельних матеріалів).Використання даних електроприводів дозволяє значно спростити конструкцію механізму подачі і виключити застосування редуктора в кінематичного ланцюга. У сучасних механізмах подачі верстатів з ЧПУ вал двигуна через муфту приєднується до валу гвинта шарико пари (ШВП), а гайка ШВП жорстко з'єднана з виконавчим органом верстата (координатний стіл, супорт, револьверна головка і т.п.). Привід подачі має два датчика зворотнього зв'язку - по швидкості (тахогенератор) і по дорозі (кругової або лінійний). У перспективних цифрових електроприводах подачі датчик швидкості відсутня, так як швидкість обчислюється як відношення шляху до часу (обчислення здійснюється безпосередньо в цифровій системі управління).
Техогенератор завжди встановлюється на вал двигуна (деякі двигуни подачі виготовляють з вбудованим тахогенератором, та / або круговим датчиком положення, та / або електромагнітним гальмом для механічної фіксації нерухомої координати).
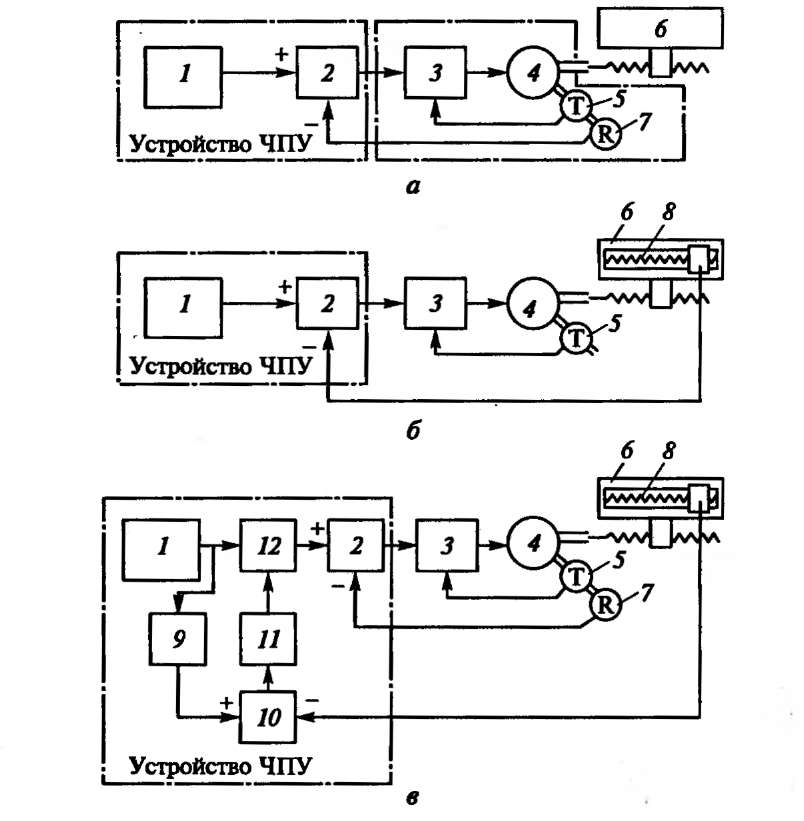
Рис. 1.11. Структурні схеми електроприводів, що стежать:а, 6, в - з напівзамкнутим, замкнутим і гібридним контурами зворотного зв'язку по шляху; 1 - основний блок пристрою ЧПУ; 2 - вузол керування приводом; 3 - блок приводу; 4 - двигун подачі; 5 - тахогенератор Т; 6 - стіл верстата; 7 - кругової датчик До зворотного зв'язку по шляху; 8 - лінійний датчик зворотного зв'язку по шляху; 9 - завдання переміщення; 10 - блок програмного або апаратного порівняння; 11 - завдання додаткового переміщення; 12 - блок підсумовування
Існують три варіанти реалізації зворотного зв'язку по шляху в залежності від установки датчика (датчиків) шляху в кінематичного ланцюга приводу. На рис. 1.11 наведені приводи, що стежать з напівзамкнутим, замкнутим і гібридним контурами зворотного зв'язку по шляху. У верстатах нормальної точності, що забезпечують точність позиціонування ± 10 мкм, можливе застосування напівзамкненого контуру зворотного зв'язку по шляху. У цьому випадку кругової датчик шляху встановлюється на вал двигуна, а ШВП не охоплений зворотним зв'язком.Це призводить до того, що похибка ШВП переноситься на виріб. Систематичну складову цієї похибки, повторювану стабільно, можна компенсувати за допомогою заздалегідь програмованих компенсуючих сигналів.У прецизійних верстатах безпосередньо на виконавчому механізмі подачі (координатний стіл) верстата встановлюється високоточний лінійний датчик. Така структура є замкнутою по дорозі. При даній схемі зазори в кінематичного ланцюга і пружні деформації впливають на коливання приводу. У ряді випадків, особливо у важких верстатах з довгими кінематичними ланцюгами, застосовують схему з гібридним контуром зворотного зв'язку по шляху, в якій використовують два датчика: круговий, встановлений на валу двигуна, і лінійний, розміщений на столі верстата. При цьому кругової датчик служить для позиціонування, а лінійний - для автоматичної корекції похибок кінематичного ланцюга.
Датчики положення
Датчик зворотного зв'язку. Пристрій, у вимірювальному елементі якого величина контрольованого переміщення викликає зміну будь-яких фізичних параметрів, називається датчиком зворотного зв'язку. Потім вимірювальна система перетворює ці параметри в систему первинних сигналів, що містять інформацію необхідної точності про контрольовані параметри процесу. У замкнутих системах числового або циклового програмного керування необхідно контролювати переміщення. При цьому на верстаті контролюються як лінійні, так і кругові переміщення. У системах управління датчики положення (зокрема, датчики зворотного зв'язку по шляху) здійснюють активний контроль за переміщенням і позиціонуванням робочих органів верстатів і машин. На рис. 1.12 наведено класифікацію датчиків положення, які за принципом дії поділяються на оптичні (імпульсні) та індуктивні (аналогові).По конструкції датчики поділяються на кругові (для вимірювання кутових обертальних переміщень) і лінійні (для вимірювання зворотно-поступальних переміщень).
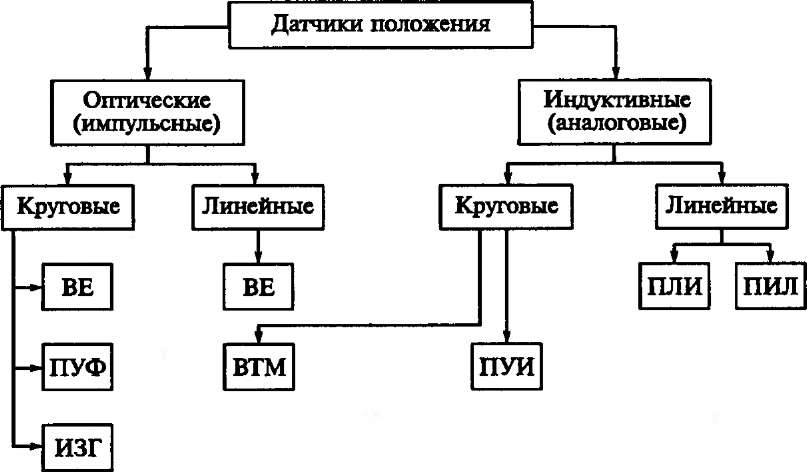
Рис. 1.12. Класифікація датчиків положення промислових серій:ВЕ - оптичні датчики (кругові, лінійні); ПУФ, ІЗГ - оптичні кру говие датчики; ВТМ - резольвер (обертові трансформатори); ПУИ - кругові індуктосіни; Плі, ПИЛОК - лінійні індуктосіни
Кругові датчики використовуються також для непрямого виміру лінійних переміщень при установці їх на валу в одній з ланок кінематичного ланцюга. Вимірювальні перетворювачі переміщень формують стандартні електричні сигнали, що дають інформацію про величину і напрямку переміщення механізму. До складу перетворювача входить датчик положення, інтерполятор і підсилювач. Датчики положення є одним з найважливіших елементів системи керування верстатом і багато в чому визначають точність обробки деталі на верстаті, так як є елементом активного контролю технологічного процесу. У табл. 1.6 наведені дані по точності вимірювальних систем.Оптичні (імпульсні) датчики в порівнянні з аналоговими забезпечують більш високу точність. Комплект даного датчика складається з механічної, оптичної та електронної систем. Механічна система забезпечує точне переміщення шкали з ризиками щодо знімача. Принцип роботи кругового оптичного датчика заснований на фотоелектричні зчитуванні растрових і кодових сполучень. У конструкцію кругового оптичного (фотоімпульсного) датчика (рис. 1.13, а) входить растрове вимірювальне ланка, що складається з рухомого вимірювального растра 6 і нерухомого індикаторного растрового аналізатора 3. До складу реєстрового аналізатора (рис. 1.13, б) входять чотири поля зчитування А, В, А, В, кожне з яких має просторовий зсув щодо попереднього на у4 періоду растру.

Паралельний світловий потік, сформований конденсатором 2 освітлювача 1, проходячи через растрове пару, аналізується чотириквадрантний приймачем 4.
Сполучені відповідним чином фотоприймачі дозволяють отримати два зсунутих на 90 ° струмових сигналу (sin і cos) 1А і 1В, постійна складова яких не залежить від рівня освітленості (рис. 1.13, в). Наявність двох зсунутих на 90 ° вимірювальних сигналів дозволяє визначити напрямок переміщення механізму і підвищити роздільну здатність перетворювачів при обробці цих сигналів в електронних блоках датчиків. Сигнал 1А випереджає сигнал 1В при обертанні за годинниковою стрілкою вимірювального растра 6, жорстко пов'язаного з валом датчика (вид з боку валу датчика). Крім вимірювальних сигналів переміщення датчик має сигнал нульової мітки (сигнал початку відліку) IRi (див. рис. 1.13, в), який виробляється один раз на оборот валу і дозволяє використовувати датчик кута повороту як датчик кутового переміщення.
При повному збігу аналогічних кодових растрів I і II світловий потік, що приймається одній із секцій фотоприймача 5, в 3-4 рази більше, ніж при будь-якому іншому взаємному положенні цих кодових растрів. Електронна система підсилює ці сигнали, а потім перетворить їх у прямокутні (рис. 1.13, г). Збільшення числа імпульсів на одиницю переміщення (зменшення дискретності) досягається електронною схемою.
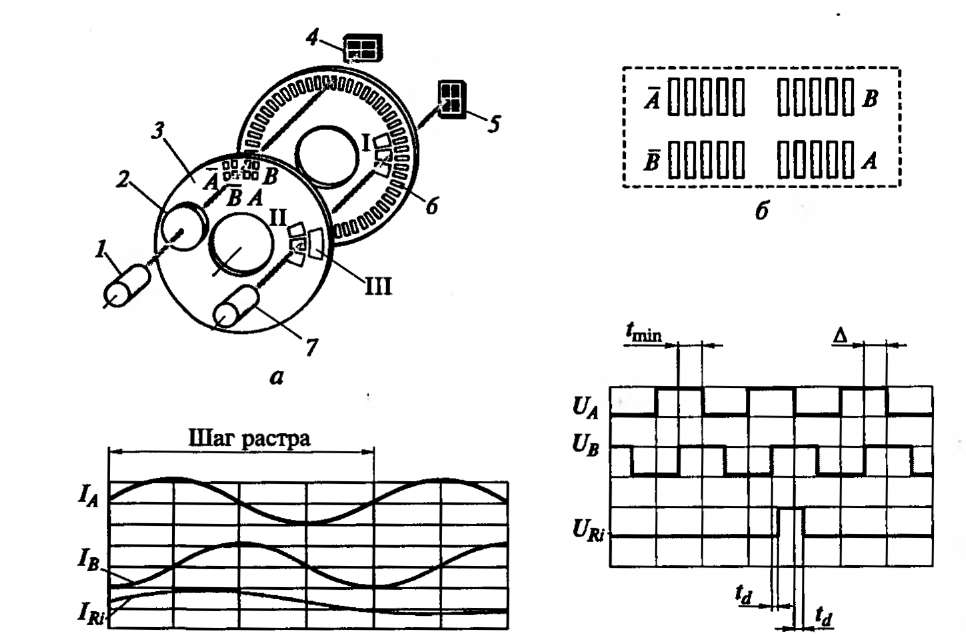
Рис. 1.13. Круговий оптичний датчик:а - конструкція датчика; 6 - растровий аналізатор; в - вимірювальні сигнали датчика; г - вихідні сигнали датчика типу ПІ (ТТЦ; 1, 7 - освітлювачі; 2 - конденсатор; 3 - нерухомий індикаторний растровий аналізатор; 4 - чотириквадрантний приймач; 5 - чотирьохсекційний фотоприймач; 6 - рухливий вимірювальний растр; I, II - кодові растри; III - діафрагма; А, В, А, В, - поля зчитування на растровому аналізаторі; 1Л, 1В - вимірювальні сигнали струму; 1 / л, Vв - вихідні сигнали напруги; 1Ю, - сигнали початку відліку (нульова мітка); / т1п - мінімальний час зближення фронтів вихідних сигналів; ^ - час затримки сигналу референтної мітки щодо основних сигналів (4 / < 100 ні); Д - відстань між найближчими фронтами сигналів 1 / чи 11в (дискретність)
Крім цього в оптичний датчик може вбудовуватися блок інтерполяції сигналів, що виконує додатковий розподіл на 5 або 10.
Оптичні датчики лінійних переміщень здійснюють перетворення вимірюваного переміщення в послідовність електричних сигналів, що містять інформацію про величину і напрямку цих переміщень для подальшої обробки в системах ЧПУ або ЦПУ. Лінійний оптичний (фотоімпульсний) датчик (рис. 1.14, а) складається з растрової шкали (крок растра 20 або 40 мкм) 1 і нерухомою пластини 6 індикаторного растрового аналізатора. У конструкцію лінійного оптичного датчика також входить плата 4 освітлювачів (інфрачервоні ІЧ- випромінювачі) і плата 7 фотоприймачів - зчитує голівка (кремнієві фотодіоди).
При відносному переміщенні растрової шкали (Мал. 1.14, б) і індикаторної пластини її поля зчитування А, В, А, В з кроком растру, відповідним кроку растра шкали, реалізують два ідентичних каналу прийому випромінювання: А-А, В-В, в складу кожного каналу входять два поля зчитування, растри яких мають просторовий зсув один щодо іншого, рівний% кроку растра, і відповідно по два освітлювача 5 і фотоприймача 8. Поля зчитування А мають просторовий зсув растрів щодо растрів полів зчитування В, рівний 4 кроки растру. Побудовані таким чином поля зчитування формують два зсунутих на 90 ° струмових сигналу (sin і cos) / А і 1В (рис. 1.14, в).
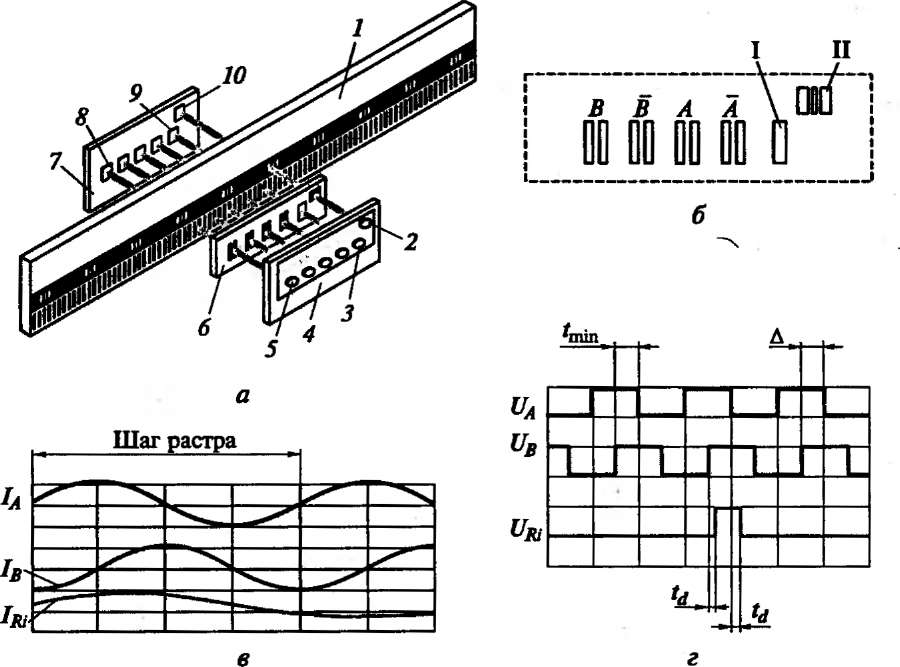
Рис. 1.14. Лінійний оптичний датчик:а - конструкція датчика; 6 - растровий аналізатор; в - вимірювальні сигнали датчика; г - вихідні сигнали датчика типу ПІ (ТТЬ); 1 - растрова шкала; 2, 3, 5 - освітлювачі; 4 - плата освітлювачів (ІЧ- випромінювачі); 6 - нерухома індикаторна пластина растрового аналізатора; 7 - плата фотоприймачів; _ # - 10 - фотоприймачі; I - поле діафрагми; II - канал мітки; А, В, А, В - поля зчитування на індикаторній пластині (растровому аналізаторі); 1Л, 1В - сигнали струму; / л, - сигнал референтної мітки; 1 } л, Чв - вихідні сигнали напруги; иа - сигнали початку відліку (нульова мітка); і - час затримки сигналу референтної мітки щодо основних сигналів (/ </ <300 НЕ); / т1п - мінімальний час, між фронтами сигналів Іл та верб ~, Д - відстань між найближчими фронтами сигналів ІА та Ів (дискретність)
Наявність двох зсунутих на 90 ° вимірювальних сигналів дозволяє визначити напрямок переміщення і підвищити роздільну здатність перетворювачів. Сигнал 1А випереджає сигнал 1В при переміщенні головки перетворювача від початку відліку вправо. Крім вимірювальних сигналів переміщення датчик має сигнал нульової мітки, або сигнал початку відліку, IRi, який виробляється при використанні випромінювача (освітлювача 2) верхньої растрової шкали 1 (канал мітки II) і фотоприймача 10. Електронна система підсилює ці сигнали, а потім перетворить їх у прямокутні (рис. 1.14, г).
Кругові оптичні датчики поділяються на дві групи: виробничі (класи точності 5-9), похибка яких більше 15 кут. с, і прецизійні, похибка яких менше 15 кут. с. Виробничі кругові оптичні датчики характеризуються малими габаритними розмірами. Лінійні оптичні датчики на відміну від кругових працюють в незамкнутому циклі, і їх точність залежить від температури навколишнього середовища.В даний час в сучасних пристроях ЧПУ і ЦПУ широко застосовуються оптичні датчики кругових і лінійних переміщень серії ЛІР виробництва ВКВ ІС (м. Санкт -Петербург). Датчики ЛІР конструктивно виконані у закритому виконанні (ступінь захисту від IP50 до IP65). У табл. 1.7 наведені технічні характеристики деяких датчиків кругових переміщень серії ЛІР, а в табл. 1.8 - датчиків лінійних переміщень серії ЛІР. У лінійних датчиках положення нульової (референтної) точки реалізується через кожні 50 мм (за вибором замовника може бути інше положення нульової точки).
Таблица 1.7
Технические характеристики датчиков круговых перемещений
серии ЛИР
| Тип датчика | Разрешающая способность, дискрет/об | Максимальная частота вращения вала, мин"1 | Класс точности |
| ЛИР-119А | |||
| ЛИР-128А | 7, 8 | ||
| ЛИР-137А | 7, 8 | ||
| ЛИР-158А-И | 6, 7, 8. | ||
| ЛИР-180А | 6, 7, 8 | ||
| ЛИР-190А | 3,4 | ||
| ЛИР-1170А | 3 600000 |
Технические характеристики датчиков линейных перемещений
серии ЛИР
| Тип датчика | Разрешающая способность, мкм | Максимальная величина перемещения, мм | Максимальная линейная скорость, м/мин | Класс точности |
| ЛИР-7 | 0,1 | 3,4 | ||
| ЛИР-9 | 0,1 | 2 040 | 3,4 | |
| ЛИР-10 | 0,1 | 3 220 | 3,4 | |
| ЛИР-14 | 0,1 | 8; 20 | 2, 3 | |
| ЛИР-15 | 0,1 | 2, 3 | ||
| ЛИР-17 | 0,1 | 3,4 |
Індуктивні (аналогові) датчики побудовані за принципом електромагнітної індукції і поділяються на обертові трансформатори (ОТ) (резольвер) і індуктосіни. Обертовий трансформатор має на статорі дві обмотки, взаємно зсунуті в просторі на 90 ° (тобто на У4 періоду). Статорні обмотки питають двофазним напругою змінного струму із зсувом фаз 90 ел. град. Обмотки статора створюють у повітряному зазорі електродвигуна пульсуюче магнітне поле. У безконтактних ВТ ротор виконується реактивним, а вторинна (вихідна) обмотка розташована на статорі. На вторинній обмотці формується сигнал, відповідний зрушенню осі пульсуючого магнітного поля щодо осі ротора. Цей сигнал надходить на схему фазового детектора і підсилювача. Точність вимірювання кута, що забезпечується ВТ, ± 5 кут. с. На рис. 1.15 наведені електрична схема і графічне зображення сигналів датчика ВтУ порівнянні з ВТ індуктосіни характеризуються більш високою точністю. Індуктосіни складаються з шкали (лінійної для лінійного датчика і кругової для кругового датчика) і головки, що переміщається щодо шкали.. На рис. 1.16 наведена конструкція лінійного індуктосіна. На шкалі і голівці фотохімічним способом нанесені плоскі обмотки з кроком 2 мм. Індуктосін практично є розгорнутим у площині обертовим трансформатором. На головці є дві обмотки, зсунуті одна відносно іншої на '/ 4 періоди.
Принцип роботи індуктосіна заснований на явищі електро-магнітної індукції. При взаємному переміщенні головки (статора) і лінійки (ротора) ЕРС індукції змінюється з відношенням, пропорційним відношенню sin / cos, з періодом, рівним кроку обмотки лінійки.
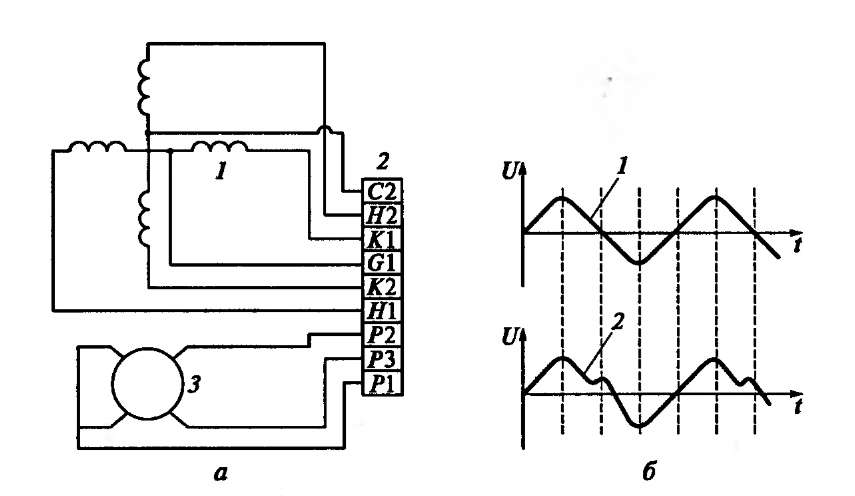
Рис. 1.15. Обертовий трансформатор:
а - електрична схема: 1 - обмотки статора; 2 - клемна коробка, 3 - обмотки ротора; 6 - сигнали датчика: 1 - гармонійний, 2 - за наявності несправності; і - напруга; / - час
При подачі напруги живлення на лінійку з головки знімаються два сигнали із зсувом одного щодо іншого на 90 °, величина яких періодично змінюється при переміщенні головки відносно лінійки. Індуктосін має захист, що виключає потрапляння феромагнітної пилу.При виборі перетворювачів переміщень враховуються клас точності верстата, тип системи ЧПУ, дискретність завдання, максимальна довжина контрольованого переміщення. При установці кругових перетворювачів дискретність лінійного переміщення механізму Д, ф, кут. с, визначається за формулоюАкр = ТЛ1імК " т),де ть - крок ходового гвинта, мкм / об; г - число імпульсів за оборот датчика; / - передавальне відношення від вала, на якому встановлений датчик, до ходового гвинта; / м - те ж, від мультиплікатора до валу датчика; Ккнт - коефіцієнт інтерполяції в електронній системі, мкм / кут. с.Для лінійних перетворювачів дискретність переміщення механізму, мкм:А = Тп / ККІТ,де Т "- крок вимірювальної шкали, мкм; Ккт - коефіцієнт інтерполяції в електронній системі, мкм / мкм. Рис. 1.16. Лінійний індуктосін: а, в - конструкція датчика; б - головка датчика; г - обмотки А -Г головки датчика; д - лінійка з вбудованою обмоткою; е - обмотка лінійки; 1 - захисний кожух; 2 - лінійка, 3 - головка; 4, 5 - рухома і нерухома частиниверстатад еДля верстатів нормальної (Н) точності рекомендуються перетворювача класів 6-8, для верстатів підвищеної (П) точності - перетворювачі класів 4, 5, для верстатів високої (В) точності - перетворювачі класу 3, для особовисокой (А) точності верстатів - перетворювачі класу 2 і для надточних (С) верстатів - перетворювачі класу 1. Малогабаритні фотоелектричні перетворювачі класів 6-8 рекомендуються для застосування в токарних і фрезерних верстатах нормальної точності. Для верстатів з підвищеними вимогами до точності рекомендуються малогабаритні фотоелектричні лінійні перетворювачі, застосування яких дозволяє виключити вплив похибок ходового гвинта на точність верстата. Для верстатів з підвищеними вимогами до точності рекомендуються малогабаритні фотоелектричні лінійні перетворювачі, застосування яких дозволяє виключити вплив похибок ходового гвинта на точність верстата. При великих (до 30 м) переміщеннях вузлів важких і унікальних верстатів застосовують лінійні індуктосіни Плі-У, ПЛІ-Н, ПІЛП1-У і комбіновані датчики.
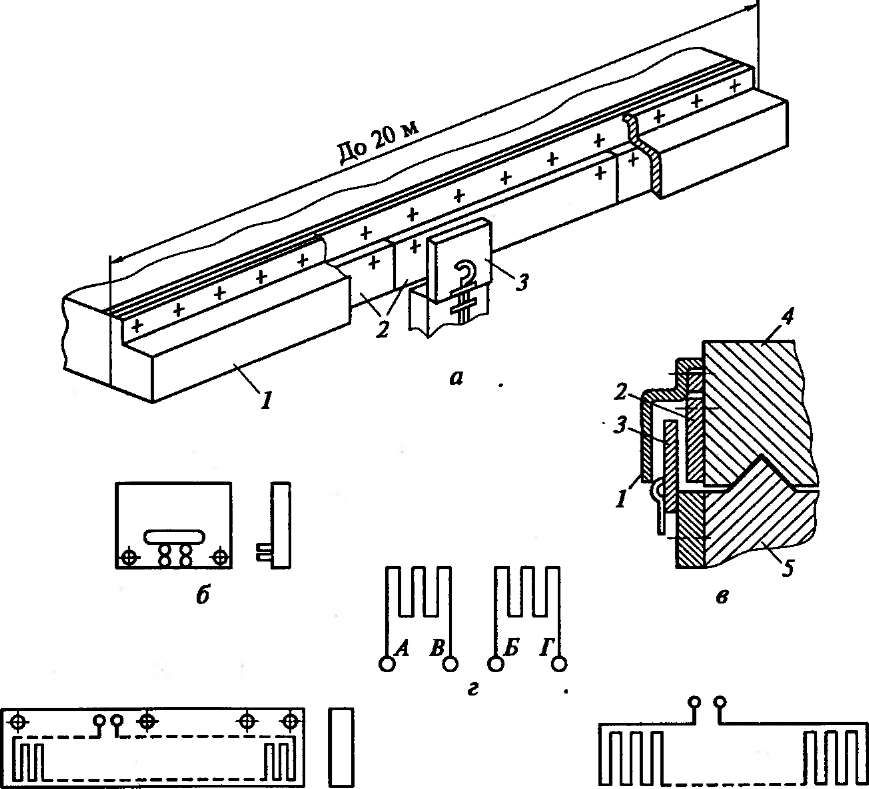
Рис. 1.16. Лінійний індуктосін: а, в - конструкція датчика; б - головка датчика; г - обмотки А-Г головки датчика; д - лінійка з вбудованою обмоткою; е - обмотка лінійки; 1 - захисний кожух; 2 - лінійка, 3 - головка; 4, 5-рухлива і нерухома частини верстата
Для координатно-розточувальних верстатів і вимірювальних машин рекомендуються фотоелектричні перетворювачі класів точності 1 - 3. У ділильних столах, ділильних головках використовуються кругові фотоелектричні датчики або індуктосіни ПУИ-18. Для поворотних столів фрезерних верстатів рекомендуються кругові оптичні перетворювачі.
Вимірювальні датчики контролю деталі та інструменту є ефективним засобом активного контролю процесу обробки.
У верстатах з ЧПК крім датчиків, що вимірюють швидкість і положення координат верстата, широко застосовуються датчики активного контролю геометричних параметрів оброблюваної деталі та інструмента. Контактні датчики фірми ЛетБІаху (Великобританія) (рис. 1.17, а) призначені для використання в конструкціях сучасних металообробних верстатів з ЧПУ. Контактні датчики забезпечують наладку інструменту, настройку на технологічну операцію та вимірювання.Використання даних контактних датчиків в розточувально- фрезерних верстатах з ЧПК і ОЦ з ЧПУ дозволяє:
• значно скоротити час налагодження інструменту і виявлення несправного інструменту;
• забезпечити автоматизовані позиціонування заготовок і завдання корекції, у тому числі на малогабаритних верстатах для швидкісної обробки;
• підвищити продуктивність обробки за рахунок зменшення числа операцій та реалізації точних вимірювань безпосередньо на верстаті.

Рис. 1.17. Вимірювальні головки фірми КетБ: а - контактні; 6 - безконтактні з використанням лазерного променя
Дослідження показали наступний розподіл часу роботи обладнання для ОЦ з ЧПУ, на яких налагодження інструменту, настроювання на технологічну операцію і контроль виконуються вручну: обробка металу - 55%, налагодження та вимірювання - 35 %, інші операції - 10%.
Для ОЦ з ЧПУ, на яких для аналогічних операцій використовуються вимірювальні системи, час роботи обладнання розподіляється наступним чином: обробка металу - 80 %, налагодження та вимірювання - 15 %, інші операції - 5%. Датчики фірми Кеш511а \ у мають високі ступінь опору ударів і вібрації, герметичне виконання, стійкість стосовно мастильно -охолоджувальної рідини та металевої стружці.
Контактні датчики з оптичною передачею інформації є ефективним засобом при необхідності передачі сигналу на невелику відстань.Датчик ОМР40 призначено малогабаритних ОЦ і верстатів для швидкісної обробки, мають шпиндель з конусом за стандартом НБК або шпиндель з конусом малого розміру. Конструкція датчика має компактні габаритні розміри: довжина - 50 мм, діаметр - 40 мм. Повторюваність вимірювань - 1,0 мкм в напрямках ± Х, ± У, + Т. Термін служби батарей датчика більше 200 ч. Дальність передачі сигналу - до 3 м. Датчики сумісні з оптичними системами фірми КешБ.
Датчик МР10 призначено багатьох видів вертикальних і горизонтальних ОЦ. Є модифікація датчика - МР10Е, призначена для використання на великогабаритних верстатах і ОЦ з ЧПУ. Датчики мають регульоване зусилля спрацьовування. Повторюваність вимірювань - 1,0 мкм в напрямках ± Х, ± У, Термін служби батарей датчика 140 ч. Дальність передачі сигналу для МР10 - до 6 м, МР10Е - до 9,5 м.Датчик МР700 забезпечує високу точність вимірювань. Іс - користування в цьому датчику сенсорної техніки з тензодатчиком істотно підвищує точність вимірювальної головки. Завдяки низькому зусиллю спрацьовування, яке залишається постійним незалежно від напрямку торкання, датчик МР700 знаменує собою оптимальне рішення для контролю корпусних деталей складної форми, у тому числі з глибокими наскрізними отворами. Повторюваність ЗО- вимірювань - 0,25 мкм. Спрощена процедура калібрування дозволяє виконувати вимірювання в усіх напрямках. Діаметр вимірювального щупа може зменшуватися до 0,25 мм, а його максимальна довжина може збільшуватися до 200 мм. Дальність передачі сигналу для МР700 - до 6 м, МР700Е - до 9,5 м.
|
|
|
|
|
Дата добавления: 2014-11-09; Просмотров: 2193; Нарушение авторских прав?; Мы поможем в написании вашей работы!