КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Магнесинная дистанционная передача переменного тока
|
|
|
|
В авиационных приборах наряду с сельсинными передачами находят применение также магнесинные индикаторные передачи. Основной недостаток обычных сельсинов связан, как уже отмечалось, с наличием у них контактного устройства.
Скользящие контакты ограничивают применение сельсинных схем в ряде устройств по соображениям безопасности. Кроме того, момент трения, основная часть которого создается за счет трения щеток о кольца, в обычных сельсинах оказывается значительным (десятые доли граммосантиметра). Последнее исключает возможность вращения таких сельсинов в индикаторных дистанционных передачах с помощью чувствительных элементов, таких, например, как магнитоэлектрические приборы, показания которых необходимо передать на расстояние.
От указанных недостатков свободны бесконтактные дистанционные передачи, созданные на основе бесконтактных сельсинов или на основе бесконтактного устройства типа магнесин.
Принцип действия бесконтактного сельсина (рис. 2.16) ничем практически не отличается, как уже отмечалось, от принципа действия обычного сельсина (рис. 2.11). Поэтому и принцип работы дистанционной передачи в целом с бесконтактными сельсинами практически ничем не отличается от работы передачи с контактными сельсинами, рассмотренной выше.
Конструкция магнесина чрезвычайно проста. Отсюда чрезвычайная простота конструкции всей дистанционной передачи с магнесинами. По этой причине указанная передача получила значительно большее распространение по сравнению с дистанционной передачей с бесконтактными сельсинами.
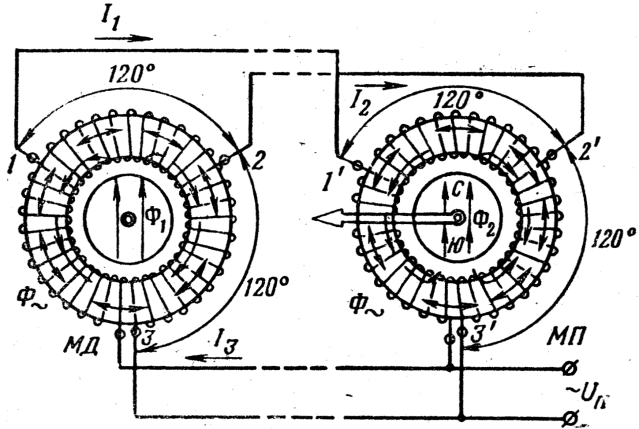
Принципиальная электрическая схема бесконтактной дистанционной передачи с магнесинами показана на рис. 2.18.
В каждой дистанционной передаче используются два однотипных магнесина с одинаковыми параметрами. Один из них является магнесин-датчиком (МД),второй - магнесин-приемником (МП).
Статор магнесина представляет собой кольцевой сердечник, набранный из листового пермаллоя, на котором равномерно намотана обмотка. В трех точках обмотки, смещенных друг относительно друга на угол 120°, имеются отпайки 1, 2, 3, в результате чего вся обмотка статора разбивается на три части (катушки), как в трехфазной системе.
В качестве ротора магнесина используется постоянный магнит цилиндрической формы, укрепленный на опорах.
Ось ротора магнесин-датчика (МД)механически связывают с осью того устройства, угловое положение которого необходимо передать на расстояние с помощью рассматриваемой передачи.
Ось ротора магнесин-приемника (МП)связана с указательной стрелкой (индексом).
Одноименные отпайки 1-1', 2-2', 3-3' обмоток статоров датчика и приемника соединены между собой трехпроводной линией связи. К обмоткам статоров магнесинов подводится напряжение переменного тока U пчастотой 400 Гц так, как показано на рис. 2.18.
|
| Рис. 2.18. Бесконтактная дистанционная передача с магнесинами |
Рассмотрим работу магнесинной передачи. При подключении напряжения питания U пк обмоткам статоров в каждом из магнесинов возникает переменный магнитный поток Ф~, который замыкается по кольцевому сердечнику.
Поток Фр ротора, созданный постоянным магнитом, также проходит по кольцевому сердечнику. Величина потока Фр определяется на основании закона Ома для магнитной цепи следующим выражением:
 ,
,
где N - намагничивающая сила постоянного тока;
 - магнитное сопротивление пути, по которому замыкается поток Фр.
- магнитное сопротивление пути, по которому замыкается поток Фр.
Сопротивление кольцевого сердечника статора на пути потока ротора Фр зависит от степени насыщения материала (пермаллоя) сердечника.
Так как насыщения пермаллоя происходит при сравнительно слабых магнитных полях, кольцевой статор магнесина в нормальных условиях работы оказывается насыщен одну часть периода за счет переменного потока Ф~ своей обмотки и не насыщен другую часть периода (когда поток близок к нулю).
Следовательно, пермаллоевый сердечник статора будет представлять собой переменное магнитное сопротивление R mдля потока Фр постоянного магнита ротора. Это означает, что магнитный поток Фр постоянного магнита будет переменным по величине.
Таким образом, общее напряжение (ЭДС) в катушках статора каждый раз обусловлено двумя причинами: напряжением питания U пи дополнительной ЭДС е д, наводимой в обмотках за счет пульсирующего потока Фр ротора.
Так как обмотки МД и МП одинаковы, напряжение питания U п приложенное к обмоткам, распределяется между катушками также одинаково.
Поэтому, если не учитывать дополнительную ЭДС е д, потенциалы одноименных отпаек 1-1', 2-2', 3-3' в МД и МП всегда одинаковы. Величина дополнительных ЭДС ед в катушках обмоток датчика и приемника будет зависеть как от величины потока Фр, так и от взаимного расположения постоянного магнита и этих обмоток.
Пусть роторы МД и МП имеют одинаковые угловые положения. Тогда, очевидно, дополнительные ЭДС е дв соответствующих катушках датчика и приемника будут также одинаковы. Отсюда потенциалы одноименных точек (отпаек) 1-1', 2-2', 3-3' датчика и приемника также одинаковы и уравнительные токи между ними не протекают.
Если же угловые положения роторов МД и МП неодинаковы, дополнительные ЭДС ед в одноименных катушках датчика и приемника имеют разные величины, в результате возникают уравнительные токи I 1, I 2, I 3. Эти токи, протекая по катушкам статоров, взаимодействуют с потоком ротора Фр, что приводит к появлению вращающего (синхронизирующего) момента, который по закону Ленца всегда направлен в сторону уничтожения рассогласования роторов.
Поэтому ротор магнесин-приемника (так же, как и в сельсинной передаче) будет следовать за всеми изменениями углового положения ротора магнесин-датчика. Точность отработки углов рассогласования в дистанционных передачах с магнесинами обычно составляет 1-2°.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 1825; Нарушение авторских прав?; Мы поможем в написании вашей работы!