КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сельсинная индикаторная дистанционная передача
|
|
|
|
Блок-схема сельсинной индикаторной дистанционной передачи аналогична блок-схеме потенциометрической индикаторной передаче, показанной на рис, 2.1.
Так же как в потенциометрической индикаторной передаче, индикаторный режим работы сельсинов позволяет осуществить синхронный поворот (вращение) двух механически не связанных осей (валов). В этом режиме работы ось ротора сельсин-датчика (СД)жестко связана с одной из осей системы, например с командной осью, положение которой необходимо передавать на указательный прибор (индикатор).
Ротор сельсин-приемника связан с индикаторной стрелкой, или указательным индексом.
|
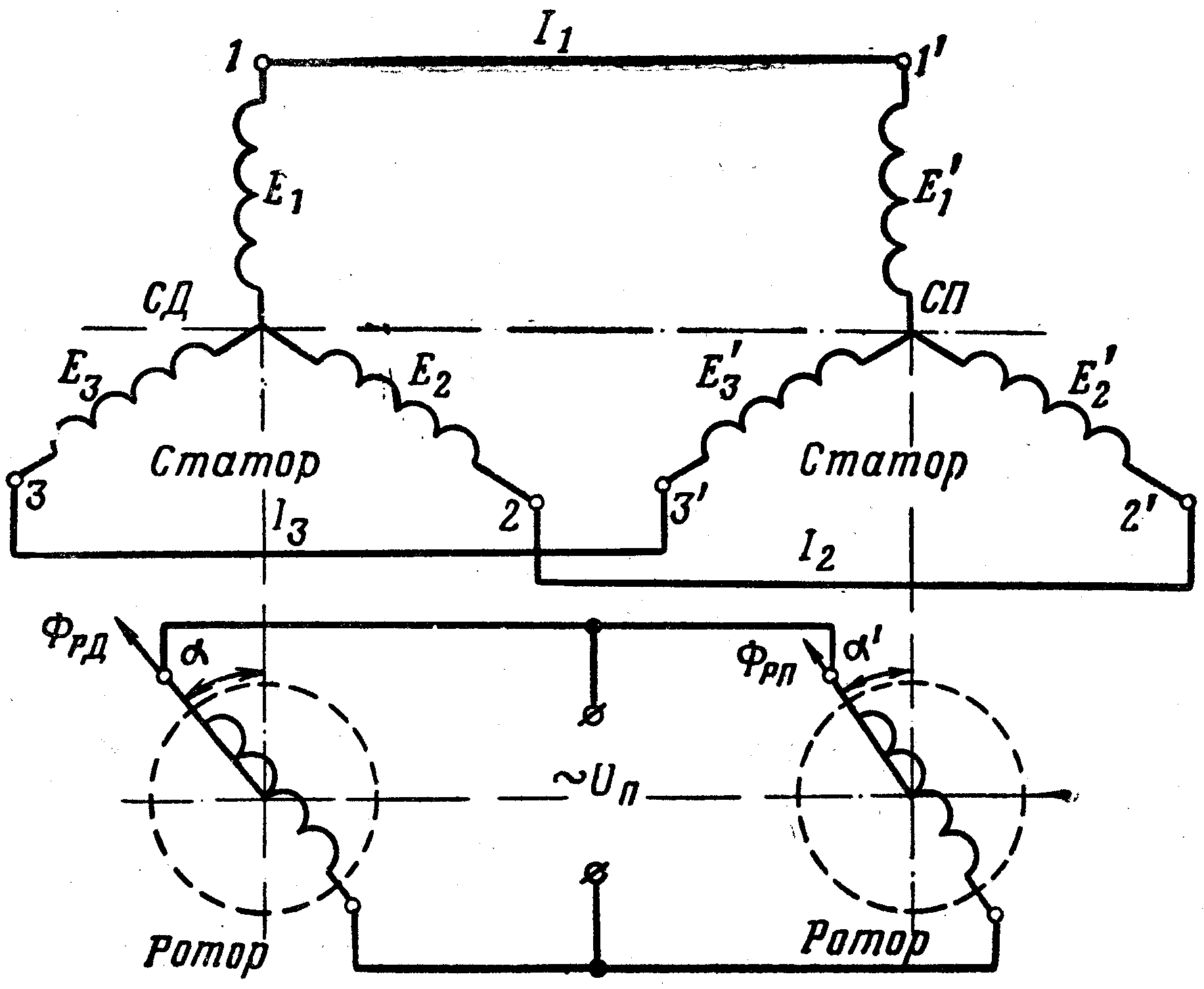
| Рис. 2.12. Электрическая схема соединения сельсинов, работающих в индикаторном режиме |
Электрическая схема соединения сельсинов, работающих в индикаторном режиме, показана на рис. 2.12, из которого видно, что в данном случае напряжение питания U пподводится одновременно к обмоткам роторов общих сельсинов, т. е. к роторам СЦ и СП. Однотипные фазы статорных обмоток СД и СП соединены между собой трехпроводной линией связи.
Пусть ось, с которой связан ротор сельсин-датчика (СД),оказалась повернутой на некоторый угол α, а ротор сельсин-приемника и связанная с ним стрелка указательного прибора остались в исходном (нулевом) положении (α' = 0). Тогда роторы СД и СП будут занимать разное положение в пространстве, т. е. оси рассматриваемых роторов окажутся взаимно сдвинутыми на угол Θ = α - α'= α (Θ - угол рассогласования). Оси переменных магнитных потоков ФРД и ФРП, созданных соответственно обмотками роторов сельсин-датчика (СД)и сельсин-приемника (СП),за счет переменного напряжения питания U п окажутся также взаимно сдвинутыми на угол Θ = α. Поэтому ЭДС в одноименных фазах обмоток статоров СД и СП,наводимые за счет потоков соответственно ФРД ФРП, будут неодинаковы:  Это приводит к появлению уравнительных токов в обмотках статора СД и СП и в соединительных проводах.
Это приводит к появлению уравнительных токов в обмотках статора СД и СП и в соединительных проводах.
Уравнительные токи I 1, I 2, I 3, протекая по обмоткам статора сельсин-приемника (СП),взаимодействуют с потоком ротора ФРП, что обусловливает появление вращающего момента М.
Аналогичная картина имеет место в сельсин-датчике. Направление вращающего момента М определяется по закону Ленца, т. е. момент М всегда имеет такое направление, при котором он стремится уничтожить рассогласование Θ осей ротора СД и СП как причину появления момента М. При отсутствии рассогласования осей (Θ = 0) вращающий момент М также отсутствует (М = 0),так как оси потоков ФРД и ФРП совпадают. Соответственно ЭДС будут  и, следовательно, токи I 1, I 2, I 3 = 0. Таким образом, при
и, следовательно, токи I 1, I 2, I 3 = 0. Таким образом, при  на ротор сельсин-приемника действует вращающий момент М, в результате чего ротор СП и связанная с ним индикаторная стрелка (индекс) будут поворачиваться так, чтобы угол Θ стал равен нулю. Это означает, что в индикаторном режиме работы сельсинов ротор сельсин-приемника вращается синхронно с ротором сельсин-датчика, отрабатывая каждый раз рассогласование осей роторов Θ, задаваемое сельсин-датчиком. Очевидно, что при наличии рассогласования () момент М, обусловленный этим рассогласованием, действует не только на ротор СП, но и на ротор СД (при этом знак момента противоположной). Однако ротор СД закреплен (он жестко связан с командной осью системы) и поэтому не может вращаться за счет небольшого по величине момента М. В то же время ротор СП может свободно вращаться, так как несет на себе небольшую нагрузку, например в виде индикаторной стрелки.
на ротор сельсин-приемника действует вращающий момент М, в результате чего ротор СП и связанная с ним индикаторная стрелка (индекс) будут поворачиваться так, чтобы угол Θ стал равен нулю. Это означает, что в индикаторном режиме работы сельсинов ротор сельсин-приемника вращается синхронно с ротором сельсин-датчика, отрабатывая каждый раз рассогласование осей роторов Θ, задаваемое сельсин-датчиком. Очевидно, что при наличии рассогласования () момент М, обусловленный этим рассогласованием, действует не только на ротор СП, но и на ротор СД (при этом знак момента противоположной). Однако ротор СД закреплен (он жестко связан с командной осью системы) и поэтому не может вращаться за счет небольшого по величине момента М. В то же время ротор СП может свободно вращаться, так как несет на себе небольшую нагрузку, например в виде индикаторной стрелки.
Из рассмотрения принципа действия сельсинов, работающих в индикаторном режиме, видно, что в данном случае входной величиной для сельсинной схемы является угол рассогласования Θ роторов СД и СП. Выходной величиной является вращающий момент М,под действием которого происходит синхронный поворот (вращение) роторов СД и СП до их согласованного положения.
Зависимость момента М от величины рассогласования роторов Θ имеет примерно синусоидальный характер:  . При углах
. При углах  величину момента М можно считать линейно зависящей от Θ, т. е.
величину момента М можно считать линейно зависящей от Θ, т. е.  , где к -чувствительность (коэффициент усиления) датчика.
, где к -чувствительность (коэффициент усиления) датчика.
Для сельсинов, используемых в авиационном оборудовании, величина к составляет примерно 0,4¸0,6 гс×см/град, или ~ (0,4¸0,6) 10-4 Н×м/град.
В авиационных следящих системах более, часто используется трансформаторный режим работы сельсинов.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 1618; Нарушение авторских прав?; Мы поможем в написании вашей работы!