КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Круговая следящая потенциометрическая дистанционная передача
|
|
|
|
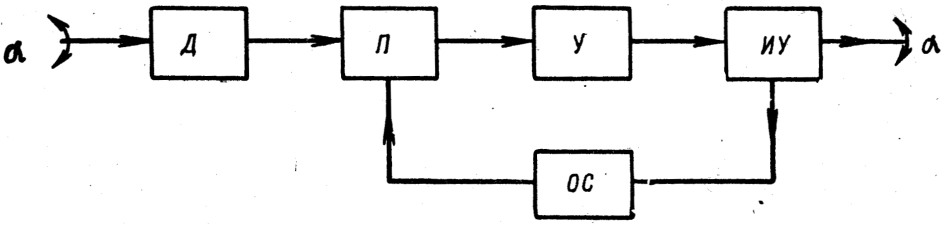
Такие следящие (силовые) дистанционные передачи позволяют осуществлять управление мощными исполнительными устройствами за счет маломощных сигналов на входе.
|
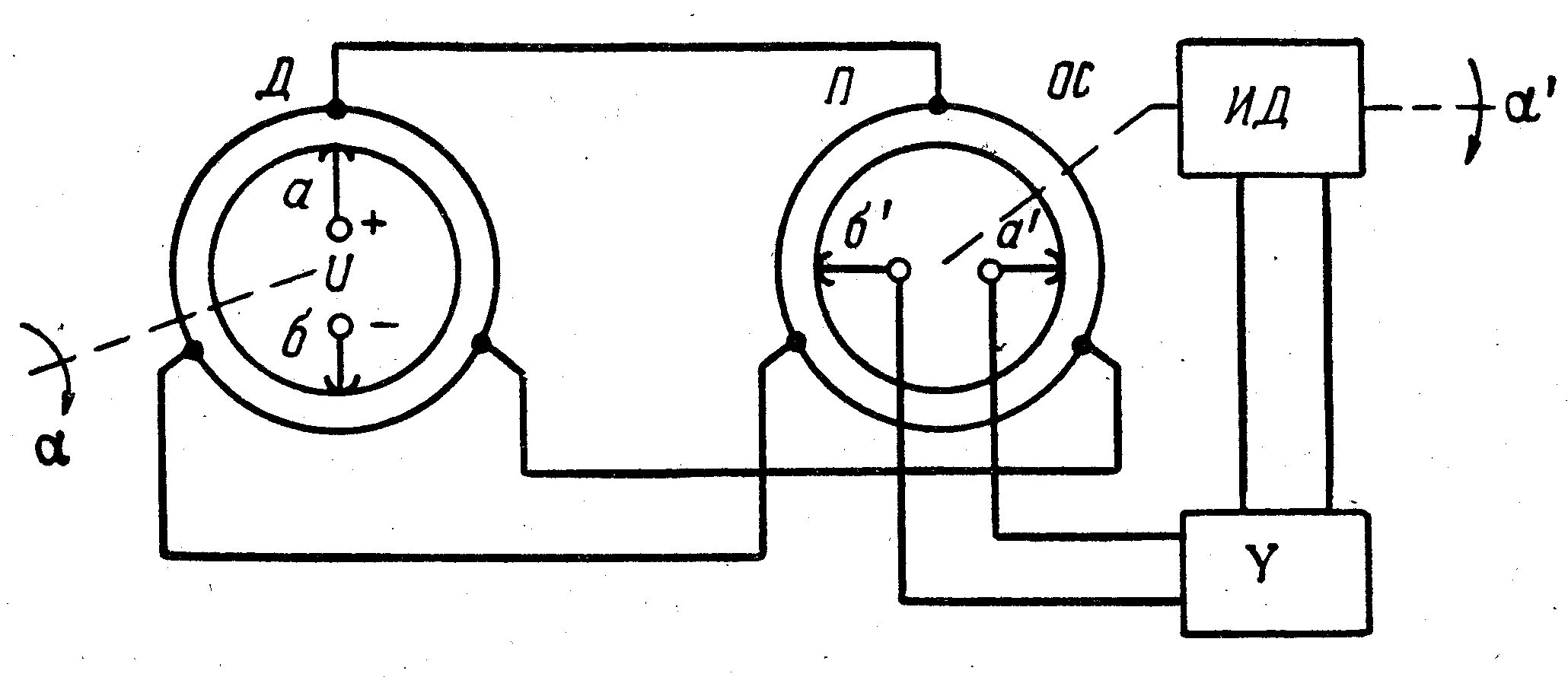
| Рис. 2.7. Блок-схема следящей передачи |
Блок-схема следящей передачи показана на рис. 2.7, где обозначено: Д - датчик передачи; П - приемник передачи; У - усилитель; ИУ - исполнительное устройство (двигатель); ОС - обратная связь.
Рассмотрим работу датчика Д и приемника П следящей потенциометрической передачи. Здесь в отличие от индикаторной передачи датчик Д и приемник П имеют одинаковую конструкцию. В качестве такого датчика Д и приемника П используются два одинаковых круговых потенциометра. Рассогласование в положениях осей датчика и приемника в индикаторной передаче приводит, как было показано выше, к появлению вращающего (синхронизирующего) момента М с. Под действием этого момента приемник передачи приходит в согласованное положение сдатчиком.
В следящей передаче рассогласование в положениях осей датчика Д и приемника П приводит к появлению электрического сигнала (напряжения) на выходе приемника U вых. Величина этого напряжения, как будет показано ниже, пропорциональна углу рассогласования (Θ) этих осей:  .
.
В следящей системе ось датчика Д жестко связана снекоторой командной осью, с помощью которой задаются управляющие (входные) воздействия (сигналы) в системе.
Ось приемника П жестко связана сисполнительной осью, которая должна отрабатывать сигналы, задаваемые командной осью, т. е. должна поворачиваться каждый раз на такой же угол, что и командная ось. Следовательно, датчик и приемник следящей системы позволяют получить электрический сигнал (напряжение), пропорциональный углу рассогласования двух механически не связанных между собой осей (валов) - командной и исполнительной.
Последнее становится понятным, если учесть, что сигнал на выходе приемника U вых пропорционален рассогласованию в датчика и приемника, а каждый из них жестко связан с одной из осей следящей системы: датчик - с командной, приемник - с исполнительной. Поэтому рассогласование осей датчика Д и приемника П передачи то же самое, что рассогласование командной и исполнительной осей.
Под рассогласованием Θ, так же как и в индикаторной передаче, понимается разность углов поворота командной оси (осидатчика Д передачи) а и исполнительной оси (оси приемника П передачи) α', т. е.  .
.
Если эти оси повернуты на одинаковый угол (α = α'), то система находится в согласованном положении, т. е. рассогласование в ней равно нулю (Θ =0).
Датчик Д передачи представляет собой круговой потенциометр, аналогичный тому, который используется в индикаторной передаче (рис. 2.2).
Напряжение питания к обмотке потенциометра подводится через два контактных кольца и две пары щеток.
Одна пара щеток (щетки а и б)жестко связана с кольцами и вращается вместе с осью датчика, т. е. вместе с командной осью системы. Щетки а и б перемещаются по обмотке потенциометра, касаясь ее в диаметрально противоположных точках. Вторая пара щеток обеспечивает соединение источника питания постоянного тока с кольцами.
С трех неподвижных точек обмотки 1, 2, 3 (трех отпаек), смещенных друг относительно друга на 120º, снимаются напряжения U 12, U 23, U 31величины которых изменяются при повороте оси датчика (щеток а и б) так, как показано на рис. 2.4. Указанные напряжения с помощью трехпроводной линии передачи подводятся к трем неподвижным точкам 1, 2, 3 обмотки приемника П передачи (рис. 2.8). Приемник П, как уже отмечалось, представляет собой также круговой потенциометр, конструкция и параметры которого такие же, как у датчика Д.
Подвижные щетки а и б приемника П жестко связаны с кольцами и с осью приемника (так же, как у датчика Д)и вращаются вместе с исполнительной осью следящей системы. Вторая пара щеток (неподвижные щетки), перемещаясь по кольцам, обеспечивает соединение приемника П с последующим элементом (усилителем) следящей системы. Определим величину напряжения U вых на выходе приемника П для различных значений рассогласования Θ в системе.
Рассогласование в при этом будем задавать путем поворота оси датчика Д, оставляя неподвижной ось приемника П. Обычно за согласованное положение датчика Д и приемника П передачи принимается такое положение их осей, при котором напряжение U вых=0. Этому положению соответствует, как будет показано ниже взаимный сдвиг подвижных щеток датчика Д и приемника П на 90° (рис. 2.8, а).

|
| Рис. 2.8. Распределение потенциалов точек круговых потенциометров при различных положениях подвижных щеток (а, б, в) |
Метод определения потенциалов точек 1, 2, 3 и соответственно напряжений между этими точками U 12, U 23, U 31на выходе датчика Д тот же, что и в индикаторной передаче. Напряжение питания U подводится к подвижным щеткам а и б датчика, которые делят обмотку потенциометра на две равные части, каждая из которых составляет 180°. Так как эти две части включены параллельно но отношению к питающему напряжению U, то величина напряжения, приходящаяся на один градус обмотки, будет равна  .
.
Отсчет потенциалов отдельных точек потенциометра будем вести от щетки б, потенциал которой принимаем равным нулю:  (щетка б присоединена к минусу источника питания).
(щетка б присоединена к минусу источника питания).
При рассмотрении за исходное положение датчика Д и приемника П принимаем положение, показанное на рис. 2.8, а. Тогда потенциалы точек 2 и 3 датчика, каждая из которых удалена от щетки б на 60°, будут  . Потенциал точки 1, удаленной от щетки б на 180°, равен
. Потенциал точки 1, удаленной от щетки б на 180°, равен  .
.
Так как точки 1, 2, 3 датчика постоянно соединены трехпроводной линией связи соответственно с точками 1', 2', 3' приемника, то потенциалы этих точек всегда одинаковы, т. е.  (падением напряжения в проводах связи пренебрегаем). Тогда напряжение U' 12, приложенное между точками 1' и 2' приемника (рис. 2.8, а), будет
(падением напряжения в проводах связи пренебрегаем). Тогда напряжение U' 12, приложенное между точками 1' и 2' приемника (рис. 2.8, а), будет  .
.
Напряжение U' 23приложенное между точками 2' и 3' равно
 , а приложенное U' 31 между точками 2' и 3' будет
, а приложенное U' 31 между точками 2' и 3' будет  .
.
Определим потенциалы подвижных щеток а и б приемника П для рассматриваемого случая. Так как напряжение U' 12приложено между точками 1' и 2', взаимно сдвинутыми на 120°, то на каждый градус дуги 1' - 2' потенциометра приходится напряжение, равное  .
.
Щетка а' расположена выше точки 2' на 30°. Следовательно, ее потенциал φ' б будет больше потенциала φ' 2 точки 2' на величину  .
.
Отсюда потенциал щетки а' равен
 .
.
Аналогично определяется потенциал φ' б второй подвижной щетки б' приемника. Напряжение U' 13=- U' 31. приложено между точками 1' и 3'. Напряжение, на каждый градус дуги 1' - 3' потенциометра будет  . Щетка б' расположена выше точки 3' на 30°. Следовательно, ее потенциал φ' ббудет больше потенциала φ' 3 точки 3' на величину
. Щетка б' расположена выше точки 3' на 30°. Следовательно, ее потенциал φ' ббудет больше потенциала φ' 3 точки 3' на величину  . Соответственно потенциал щетки б' равен
. Соответственно потенциал щетки б' равен
 .
.
Тогда напряжение U вых на выходе приемника для рис. 2.8, а будет
 .
.
Отсюда видим, что при взаимно перпендикулярном расположении подвижных щеток датчика (щетки а и б) и приемника (щетки а', б')напряжение на выходе приемника U выхравно нулю. Поэтому за исходное, согласованное положение датчика и приемника, которому соответствует угол рассогласования системы Θ = 0, и принято положение датчика и приемника, показанное на рис. 2.8, а, для которого U вых0=0.
Пусть подвижные щетки а', б' приемника П остаются в фиксированном положении α' 0, показанном на рис. 2.8, а, а подвижные щетки а и б датчика Д переместились, например, на угол α 1 = +30° в направлений движения стрелки часов (рис. 2.8, б). Тогда в системе возникает рассогласование Θ = α 1 - α' 0 = +30°, которому соответствует некоторое значение выходного напряжения U вых,величину которого можно определить так же, как это сделано при Θ = 0.
Действительно, при α 1 = 30°(рис. 2.8, б):
 ;
;
 ;
;
 .
.
Потенциалы точек соответственно равны:

Тогда напряжения U' 12и U' 13между соответствующими точками приемника равны:
 ;
;
 .
.
Отсюда потенциал φ' ащетки а' приемника будет
 .
.
Потенциал φ' б щетки б' приемника соответственно равен
 .
.
Тогда напряжение U выхна выходе приемника при α =30° будет
 .
.
Определяя таким же способом величину U вых при α = +60° (рис. 2.8, в), получим
 .
.
Если подвижные щетки а, б перемещать от исходного, согласованного положения
Θ = 0 (рис. 2.8, а) против движения стрелки часов, т. е. в противоположном направлении, то на выходе приемника будем получать те же значения напряжения, но обратного знака.
Так, при повороте щеток а и б датчика Д на угол α = -30° получим  ; соответственно при повороте щеток на угол α = -60° на выходе приемника будет напряжение
; соответственно при повороте щеток на угол α = -60° на выходе приемника будет напряжение  .
.
Из рассмотренного видно, что при повороте командной оси в системе возникает рассогласование ( ), и на выходе приемника появляется сигнал (напряжение U вых),величина и полярность которого определяются соответственно величиной и знаком указанного рассогласования Θ.
), и на выходе приемника появляется сигнал (напряжение U вых),величина и полярность которого определяются соответственно величиной и знаком указанного рассогласования Θ.
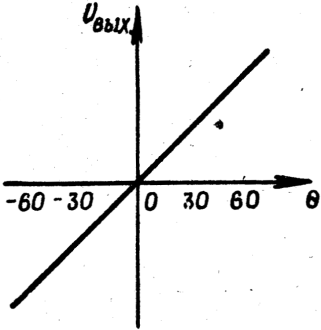
Таким образом, потенциометрический датчик Д и приемник П следящей системы представляют в данном случае измерительное устройство, которое преобразует угловое рассогласование их осей Θ в пропорциональный ему электрический сигнал U вых. Статическая характеристика данного потенциометрического измерительного устройства, т. е. зависимость выходного напряжения U выхв функции угла рассогласования Θ осей системы U вых = f (Θ), показана на рис. 2.9. Указанная характеристика построена на основании значений U вых, приведенных выше для углов рассогласования Θ, равных 30; 60; -30; -60°. Из рис. 2.9 видно, что зависимость U вых = f (Θ) в пределах рассмотренных углов рассогласования является линейной.
Рассмотрим работу круговой" следящей потенциометрической передачи в целом. В соответствии с блок-схемой передачи (рис. 2.7) ее принципиальная электрическая схема может быть представлена так, как показано на рис. 2.10, где обозначено:
Д - потенциометрический датчик;
П - потенциометрический приемник;
У - усилитель;
ИД - реверсивный электродвигатель с редуктором, перемещающий исполнительную ось системы.
Одновременно с перемещением данной оси электродвигатель перемещает подвижные щетки приемника П. Этим обеспечивается обратная связь системы.
Пусть дистанционная передача находится в согласованном положении (Θ = 0), т. е. Входная (командная) и выходная (исполнительная) оси системы согласованы. Тогда напряжение U выхна выходе приемника равно нулю U вых = 0), сигнал на вход усилителя не поступает, соответственно электродвигатель не вращается и вся система находится в состоянии покоя.
При повороте командной оси на некоторый угол α1 на такой же угол поворачиваются подвижные щетки а и б датчика. При этом на щетках а' и б' приемника появляется напряжение U выхпропорциональное возникшему рассогласованию в системе. Напряжение U вых,будучи усилено с помощью усилителя У поступает на исполнительное устройство системы - реверсивный электродвигатель.
|
| Рис. 2.9. Статическая характеристика U вых = f (Θ) потенциометрического измерительного устройства |
Электродвигатель начинает вращаться, перемещая исполнительную ось системы в таком направлении, в котором переместилась командная ось (на угол α1). Другими словами, электродвигатель начинает отрабатывать рассогласование Θ, внесенное в систему за счет поворота командной оси на угол α1. Но электродвигатель связан механически не только с исполнительной осью системы, но и с подвижными щетками а' и б ' приемника П (обратная связь системы). Поэтому электродвигатель, перемещая исполнительную ось системы, одновременно перемещает щетки а' и б ' приемника в таком направлении, чтобы система оказалась в новом согласованном положении. Очевидно, что вращение электродвигателя прекратится тогда, когда напряжение, подаваемое на электродвигатель с усилителя, станет равно нулю. Последнее будет иметь место, когда подвижные щетки обоих потенциометров (датчика Д и приемника П) снова придут в согласованное положение, т. е. вновь расположатся в пространстве под углом 90° друг к другу. В этом случае напряжение на выходе приемника U выхстанет снова равным нулю и система примет новое равновесное состояние. Для перехода системы в это состояние необходимо, чтобы электродвигатель, отрабатывая рассогласование, заданное путем поворота командной оси на угол α1, повернул исполнительную ось системы, а вместе с ней и подвижные щетки приемника П на такой же угол.
Таким образом, исполнительная ось постоянно следит за положением командной оси системы.
Точность отработки исполнительной осью сигналов, задаваемых командной осью, в авиационных следящих системах достаточно высока. Обычно погрешность передачи составляет около 1°.
Мощность сигнала U вых получаемого на выходе приемника П при рассогласовании, недостаточна для непосредственного управления исполнительным электродвигателем ИД. Поэтому в следящих дистанционных передачах применяется дополнительный усилитель У, показанный на рис. 2.10.
|
| Рис. 2.10. Принципиальная схема следящей потенциометрической передачи |
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 1627; Нарушение авторских прав?; Мы поможем в написании вашей работы!