КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример следящей системы управления углом поворота рабочего механизма
|
|
|
|
В рассматриваемой системе управляемым параметром является величина угла поворота вала β, рабочего механизма (РМ). Угол поворота вала β равен углу поворота движка потенциометра Пвых, т.к. оба они расположены на исполнительной оси (ИО). Величиной задающего параметра в данном случае является величина угла поворота α движка задающего потенциометра Пвх, находящегося на командной оси (КО). Задача имеющейся системы управления состоит в слежении исполнительной оси за произвольным изменением положения командной оси. Принципиальная схема рассматриваемой следящей системы изображена на рисунке 22.1.

Рис.22.1. Принципиальная схема следящей системы
УПТ – усилитель постоянного тока, ТП – тиристорный преобразователь,
М – двигатель постоянного тока с независимым возбуждением, А – редуктор
При действии момента сопротивления Mc задачу системы можно выразить, как соблюдение равенства углов:
β (t) = α (t) (1.13.1.)
Тогда сигнал рассогласования будет определен выражением:
Δu(t) = uα (t) − uβ (t) = kп [α (t) −β (t)] = kпΔ(t) (1.13.2.)
uα, uβ – выходные напряжения потенциометров, kп – их передаточный коэффициент.
В результате усиления сигнала Δ u (t) в усилителе постоянного тока (УПТ) и преобразовании его в тиристорном преобразователе (ТП), сигнал поступает на обмотку двигателя (М). Величина поступившего на обмотку сигнала uд(t) будет зависеть от величины сигнала рассогласования Δ u (t) передаточных коэффициентов УПТ и ТП, и примет следующий вид:
uд (t) = kуптkтпΔu(t) = kуптkтпkпΔ(t) (1.13.3.)
Выходным параметром двигателя (М) будет скорость его вала ωд , поступающая на редуктор (А), а входным параметром рабочего механизма (РМ) – скорость ωр выходного вала редуктора. Структурная схема следящей системы изображена на рисунке 22.2.
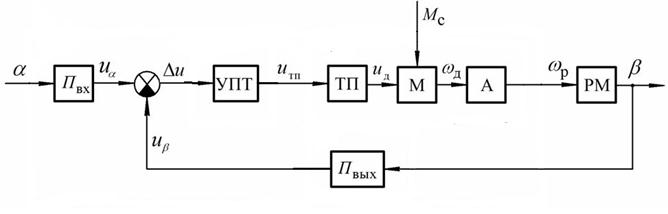
Рис.22.2. Структурная схема следящей системы
При одинаковых положениях движков потенциометров Пвх и Пвых, угол рассогласования между ними будет равен нулю, поэтому система будет находиться в покое. При изменении угла рассогласования преобразованный сигнал через звенья системы будет поступать на обмотку двигателя, стараясь привести угол рассогласования к нулю и выполняя задачу управления, для данного случая:
Δ = α −β = 0 (1.13.4.)
Поворот командной оси в противоположную сторону изменит полярность сигнала, и, соответственно, заставит двигатель повернуть вал в обратную сторону.
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 1224; Нарушение авторских прав?; Мы поможем в написании вашей работы!