КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция № 46 Особенности электроприводов механизмов обогащения
8 Электрический привод грохотов и классификаторов
Грохоты и классификаторы предназначены для разделения материала по крупности и имеют различные конструкции.
Качающийся (эксцентриковый) грохот совершает качания в горизонтальной плоскости. Качание сообщается от двигателя через эксцентриковый вал с шатуном.
Мощность двигателя качающегося грохота определяется выражением [6]
 (17)
(17)
где G – вес подвижной рамы с ситами и материалом;
R – эксцентриситет;
r – расстояние центра тяжести подвижной рамы от оси вала; ω – скорость вращения вала; η – КПД передачи.
Инерционный (гирационный) грохот состоит из короба, который опирается на эксцентриковый вал вибратора и совершает круговые движения в вертикальной плоскости. Динамические усилия частично уравновешиваются контргрузами, закрепленными на маховике эксцентрикового вала. Мощность двигателя инерционного грохота может быть определена по формуле [8]
 (18)
(18)
где G0 – вес инерционных грузов;
r – радиус окружности, по которой движется центр тяжести инерционного груза;
d – диаметр цапфы вала;
δ – амплитуда колебаний сита;
G – вес вибрирующих частей грохота и сортируемого материала;
ω – скорость вращения вала;
η – КПД передачи.
Барабанный грохот – сухой или с промывкой состоит из вращающегося металлического каркаса, на котором закреплены решета, образующие просеивающие поверхности.
Мощность двигателя барабанного грохота ориентировочно определяется по формуле
 (19)
(19)
где Q производительность, т/час.
Мощность двигателей грохотов обычно не превышает 10 кВт, регулирование скорости двигателей не требуется, поэтому для привода грохотов применяются асинхронные коротко-замкнутые двигатели.
Механические классификаторы служат для разделения материала на две фракции по скорости его падения в жидкой среде: осевшую фракцию, более крупную (пески) и взвешенную, более мелкую (слив). Классификаторы бывают спиральные и реечные.
К приводу классификаторов не предъявляется специальных требований, регулирование скорости не требуется, условия пуска нормальные. Мощность двигателей для классификаторов невелика (не более 20 кВт). Наиболее подходящим типом двигателя являются асинхронные короткозамкнутые двигатели закрытого исполнения с влагостойкой изоляцией (из-за высокой влажности в помещениях, в которых устанавливаются классификаторы).
Наиболее тяжелым режимом при работе классификатора может оказаться пуск после длительного останова, когда спираль или гребковая рама оказывается в осевшей массе. Для облегчения условий пуска двигателя у классификаторов предусмотрен механизм подъема спирали или гребковой рамы из корыта (вручную или с помощью вспомогательного привода). После разгона спираль или рама опускаются в корыто, нагрузка привода при этом возрастает до установившегося значения.
На рис. 12 приведена схема управления электроприводом односпирального классификатора [13], имеющим два двигателя: М1 – двигатель вращения спирали и М2 – двигатель подъема и опускания спирали. С помощью избирателей режима КН3 и КН4 могут быть выбраны три способа управления: ручное (Р), местное сблокированное (М) и централизованное управление (Ц).
При ручном управлении пуск и останов двигателя вращения спирали производится двухкнопочным постом SB1, SB2, а управление подъемом и опусканием спирали – трехкно-почным постом SB3 – SB5.
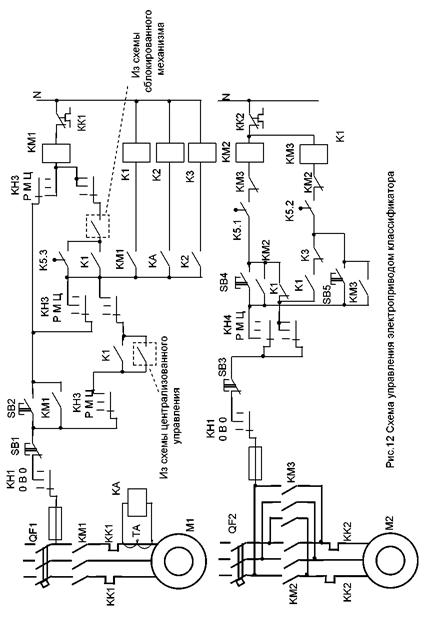
При постановке ключа управления КН4 в положение “М” или “Ц” и выключенном двигателе спирали через замкнутый контакт К1 происходит возбуждение катушки контактора КМ2 и включение двигателя М2 на подъем спирали. При достижении верхнего положения открывается контакт КН5.1 командоаппарата на механизме, контактор КМ2 выключается, и подъем спирали прекращается. При полностью поднятой спирали классификатора замыкается контакт КН5.3 командоаппарата, что подготавливает цепь контактора КМ1 к включению. В режиме централизованного управления сигнал включения подается из схемы централизованного пуска, причем сблокированный с классификатором механизм должен быть включен ранее. При включении двигателя спирали подается питание также в катушку реле К1, которое своим замыкающим контактом включает контактор КН3. Это приводит к опусканию спирали. Контакт ко-мандоаппарата КН1.3 при этом размыкается, но он уже зашунтирован контактом К1. При полном опускании спирали в корыто размыкается контакт командоаппарата КН5.2 и двигатель М2 выключается.
Если при опускании спирали двигатель М1 будет перегружен, то сработает реле нагрузки КА, а также включатся реле К2 и К3. Реле К3 своим размыкающим контактом разрывает цепь контактора КМ3, опускание спирали приостанавливается до исчезновения перегрузки. При выключении двигателя М1 спираль вновь автоматически поднимается.
|
|
Дата добавления: 2014-11-18; Просмотров: 1844; Нарушение авторских прав?; Мы поможем в написании вашей работы!