КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Function
|
|
|
|
dy=rigid(t,y)
dy=zeros(3,1);
dy(1)=y(2)*y(3);
dy(2)=-y(1)*y(3);
dy(3)=-0.51*y(1)*y(2);
Название файла и функции должны совпадать. Файл надо сохранить с названием rigid.
В этом примере абсолютная и относительная погрешность задается при помощи команды odeset, время интегрирования зададим в интервале от 0 до 12 [0 12], вектор начальных условий [0 1 1]. Для осуществления процедуры интегрирования в рабочем пространстве Matlab необходимо набрать:
» options=odeset('RelTol',1e-4,'AbsTol',[1e-4 1e-4 1e-5]);
» [t,y]=ode45('rigid',[0 12],[0 1 1],options);
Чтобы просмотреть результаты в рабочем пространстве Matlab необходимо ввести в командной строке y. Графически результаты выводятся при помощи команды plot:
» plot(t,y(:,1),'-',t,y(:,2),'-.',t,y(:,3),'.').
Объекты и модели систем. Пакет ControlSystemToolbox позволяет создавать линейные модели систем автоматического управления и решать задачи анализа и синтеза линейных систем. Основной (родительской, класса LTI – LinearTime-InvariantSystems) программной единицей пакета ControlSystemToolbox является линейный стационарный объект (далее просто объект), который представляет собой линейное звено, описанное передаточной функцией с постоянными параметрами. Объект может являться моделью всей системы, ее части или отдельного элемента системы.
Дочерними объектами (подклассами класса LTI) являются объекты четырех различных моделей:
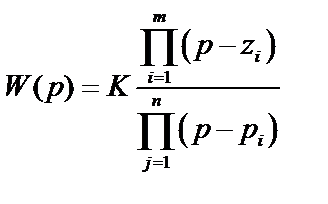
– объекты, представленные в tf -форме (в форме передаточной функции)
 ,
,  ;
;
– объекты, представленные в zpk -форме (в форме перечисления значений нулей и полюсов и статического коэффициента усиления)
 ;
;
– объекты, представленные в ss -форме (в форме системы дифференциальных уравнений для переменных состояния)
 ;
;
– объекты, представленные в frd -форме (в форме вектора частот  и соответствующих значений комплексного коэффициента передачи
и соответствующих значений комплексного коэффициента передачи  ).
).
Работа с объектами производится в основном рабочем окне Matlab.
Создание объекта в tf-форме. Пусть требуется создать объект с передаточной функцией вида
 .
.
Примечание: переменная передаточной функции (оператор Лапласа) в Matlab обозначается буквой s; в отечественной литературе по теории автоматического управления ее чаще обозначают буквой p.
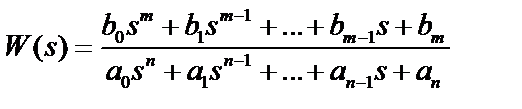
Для создания объекта используется функция tf (TransferFunction). Командная строка, создающая объект с именем name, имеет следующий вид:
Name = tf([ b 0 b 1 b 2 … bm ],[ a 0 a 1 a 2 … an ])
Имя объекта задается произвольно по тем же правилам, что имена обычных переменных. В качестве аргументов функции tf задаются массив коэффициентов числителя b 0, b 1,…, bm и массив коэффициентов знаменателя передаточной функции a 0, a 1,…, an. Коэффициенты задаются в квадратных скобках через пробел или запятую. Массив коэффициентов числителя содержит m+ 1 коэффициент, а массив коэффициентов знаменателя n+ 1 коэффициент. На месте отсутствующих степеней s значения коэффициентов принимаются равными 0.
Рассмотрим пример создания объектов.
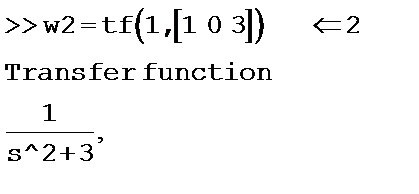
Пример 9. Создание объектов с помощью функции tf.

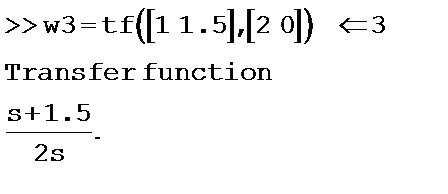
Комментарии к вычислениям:
 Если в конце строки не поставлена точка с запятой, то будет выведен результат – передаточная функция.
Если в конце строки не поставлена точка с запятой, то будет выведен результат – передаточная функция.
 Здесь второй порядок знаменателя и равен нулю коэффициент a 1.
Здесь второй порядок знаменателя и равен нулю коэффициент a 1.
 Здесь первый порядок знаменателя и равен нулю коэффициент a 1.
Здесь первый порядок знаменателя и равен нулю коэффициент a 1.
■
Нахождение корней полиномов. Система Matlab имеет функцию roots(P), которая вычисляет вектор, элементы которого являются корнями заданного полинома Р.
Рассмотрим пример. Пусть задан полином:

В системе Matlab полином задается вектором его коэффициентов:
>> p=[1,8,31,80,94,20]
При вводе функции roots(p) вычисляются корни полинома p:
>>roots(p)
Ввод моделей в виде пространства состояний производится по заданным матрицам A,B,C,D уравнений состояния системы:

Матрицы вводятся в рабочем пространстве Matlab в квадратных скобках по срокам через точку с запятой.Например матрица
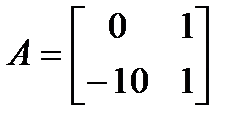
вводится следующим образом:
>> A=[0 1;−10 1]
Модель в виде пространства состояний вводится при помощи функции
sys = ss(A,B,C,D),
где sys – произвольное название системы. Перед вводом этой команды необходимо ввести в рабочее пространство Matlab последовательно матрицы A,B,C,D.
Операции над объектами. Данные операции производят объединение нескольких объектов в один объект. С их помощью можно получить передаточную функцию системы по известным передаточным функциям ее элементов.
Последовательное соединение объектов (рис. 12) реализуется с помощью операции умножения:  .
.
Рис. 12. Последовательное соединение объектов
Для приведенных выше передаточных функций из примера 9 получим
 .
.
Отметим, что этот же результат может быть получен с помощью функции series в виде
W=series(w1,w2).
Параллельное соединение объектов (рис. 13) реализуется с помощью операции сложения:  .
.
Рис. 13. Параллельное соединение объектов
Для приведенных выше передаточных функций получим
 .
.
Отметим, что этот же результат может быть получен с помощью функции parallel в виде
W=parallel(w1,w2).
Охват объекта отрицательной обратной связью (рис. 14)
Рис. 14. Охват объекта отрицательной обратной связью
реализуется выражением
и выполняется с помощью функции feedback:
W=feedback(W1,W2).
Для приведенных выше передаточных функций получим
 .
.
Пример 10. Создание модели автоматической системы.
Дана структурная схема автоматической системы (рис. 15). Необходимо создать ее модель в ControlSystemToolbox.
Рис. 15. Структурная схема автоматической системы
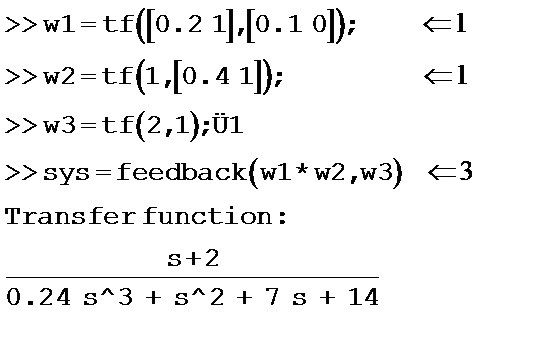
Комментарии к вычислениям:
 Создаем объекты для каждого звена.
Создаем объекты для каждого звена.
Формируем объект sys – модель всей системы.
 Передаточная функция системы выводится в командное окно.
Передаточная функция системы выводится в командное окно.
Для сложных систем получение передаточной функции производится путем последовательного применения допустимых структурных преобразований, приводящих к одноконтурному представлению системы, и получения промежуточных передаточных функций, из которых итоговая передаточная функция получается применением приведенных преобразований.
Пример 11. Пусть имеем автоматическую систему управления устройством электрической тяги, операторное представление структурной схемы которой показано на рис. 16.
Рис. 16. Система управления скоростью электропривода
Определим передаточную функцию системы  . Последовательность и получаемый результат вычислений приведены ниже:
. Последовательность и получаемый результат вычислений приведены ниже:
>>B1=[10];
A1=[1 1];
Sys1=tf(B1,A1);
B2=[1];
A2=[2 0.5];
Sys2=tf(B2,A2);
B3=[540];
A3=[1];
Sys3=tf(B3,A3);
B4=[0.1];
A4=[1];
Sys4=tf(B4,A4);
B5=[0.01];
A5=[1];
Sys5=tf(B5,A5);
Sys6=series(Sys1,Sys2);
Sys7=feedback(Sys4,Sys6);
Sys8=Sys3*Sys7;
Sys=feedback(Sys5,Sys7)
Transfer function:
108 s^2 + 135 s + 27
------------------------
110 s^2 + 137.5 s + 28.5
Полученная передаточная функция имеет второй порядок, причем собственная частота системы
 ,
,
а коэффициент затухания
 ,
,
т.е. собственные движения системы носят устойчивый слабоколебательный характер (система работоспособна).
Построение основных характеристик объекта. Создав объект с определенной структурой и параметрами, можно исследовать различные характеристики объекта. Графики характеристик строятся в специальных графических окнах. Рассмотрим способы получения основных временных и частотных характеристик (табл.9 – 12).
Примечание 1. Обозначение координатных осей графического окна производится при выводе временных характеристик:
Amplitude – ось значений выходной величины объекта;
Time (sec) – ось времени (единицы – секунды).
Таблица 9
Исследование переходной функции и весовой функции
| Команда | Комментарий |
| step(w) impulse(w) | Построение переходной функции (step) и весовой функции (impulse) функции объекта w. Время моделирования определяется автоматически. |
| step(w,t) impulse(w,t) | Построение переходной (весовой) функции объекта wна заданном отрезке времени от 0 до t (где t – это константа или переменная); t также можно задавать как массив вида 0:dt:tmax, где tmax – время окончания моделирования, dt – шаг расчета переходной функции (должен быть достаточно малым). |
| step(w1,w2,…,wn) impulse(w1,w2, …,wn) | Построение переходной (весовой) функции нескольких объектов на одной координатной плоскости. |
| step(w1,w2,…,wn,t) impulse(w1,w2, …,wn,t) | То же с заданием времени моделирования. |
Таблица 10
Исследование реакции на произвольно заданное воздействие
| Команда | Комментарий |
| lsim(w,u,t) | Построение реакции объекта w на воздействие заданное двумя массивами. Массив t – это массив значений времени. Задается в виде 0:dt:tmax, где tmax – время окончания моделирования, dt – шаг расчета (должен быть достаточно малым). Массив u – это массив значений входного воздействия того же размера, что и массив t. |
| lsim(w1,w2,…,wn,u, t) | То же для нескольких объектов (графики выводятся на одну координатную плоскость). |
Таблица 11
Исследование АФЧХ – амплитудно-фазовой частотной характеристики (Nyquistdiagram)
| Команда | Комментарий |
| nyquist(w ) | Построение АФЧХ объекта w. |
| nyquist(w,{omin,omax}) | То же с заданием диапазона частот, для которого строится АФЧХ (в фигурных скобках). Частота ominдолжна быть больше нуля. |
| nyquist(w1,w2,…,wn) | Построение АФЧХ нескольких объектов на одной комплексной плоскости. |
| nyquist(w1, …,wn,{omin, omax}) | То же с заданием диапазона частот. |
Примечание 2. Амплитудно-фазовая частотная характеристика строится в виде годографа на комплексной плоскости для диапазона частот –∞…∞ и представляет собой две симметричные относительно действительной оси кривые: одна для положительных частот, другая для отрицательных частот. В отечественной литературе принято строить амплитудно-фазовую частотную характеристику строить только для положительных частот. Обозначение осей комплексной плоскости в графическом окне: RealAxis – действительная ось, ImaginaryAxis – мнимая ось.
Таблица 12
Исследование ЛЧХ – логарифмических частотных характеристик
(Bodediagram)
| Команда | Комментарий |
| bode(w) | Построение ЛЧХ объекта w. |
| bode(w,{omin,omax}) | То же с заданием диапазона частот. Частота ominдолжна быть больше нуля. |
Окончание табл.12
| bode(w1,w2,…,wn) | Построение ЛЧХ нескольких объектов в одном окне. |
| bode(w1,w2,…,wn,{omin,omax}) | То же с заданием диапазона частот. |
| margin(w) | Построение ЛЧХ объекта w с выводом информации о запасах устойчивости автоматической системы по амплитуде и по фазе. Объект w должен описывать разомкнутую систему. |
Примечание 3. Команды bode и margin всегда строят 2 логарифмические частотные характеристики в одном окне друг под другом в одном масштабе частоты: ЛАЧХ – логарифмическую амплитудную частотную характеристику и ЛФЧХ – логарифмическую фазовую частотную характеристику. Обозначение координатных осей: Magnitude (dB) – ось значений амплитудно-фазовой частотной характеристики в децибелах, Phase (deg) – ось значений логарифмической фазовой частотной характеристики в градусах, Frequency (rad/sec) – ось частоты (в радианах в секунду).
Для того чтобы построить новую характеристику в другом графическом окне (при сохранении на экране уже имеющегося графического окна) необходимо ввести команду figure (создается новое пустое графическое окно); после запуска следующей команды вывода графиков они появятся в новом окне. При построении нескольких характеристик на одной координатной плоскости каждый график строится своим цветом в зависимости от порядка построения. Стандартным для Matlab является следующий порядок цветов графиков: синий, зеленый, красный, голубой, фиолетовый.
Пример 12. Построим переходную и весовую характеристики системы из примера 11. Для этого добавим в приведенную выше последовательность команд следующие:
>>step(Sys)
>>figure
>>impulse(Sys)
В результате их выполнения буду построены переходная и весовая функции приведенные на рис. 17.
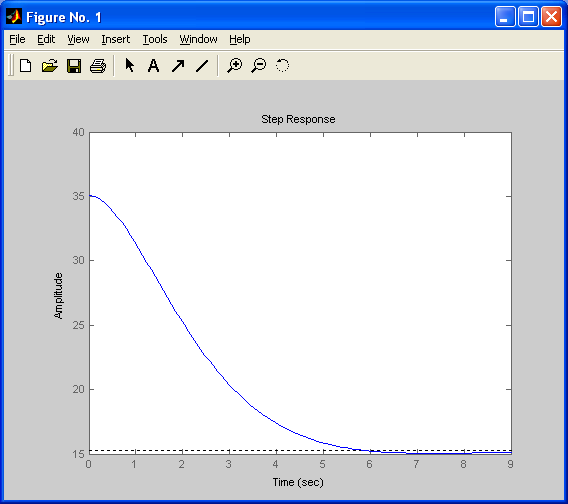
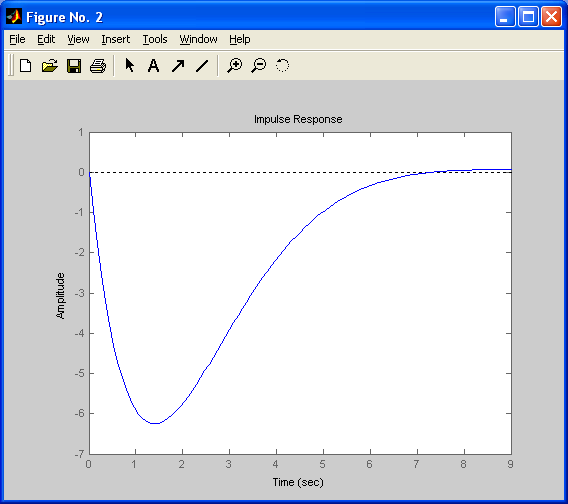
а б
Рис. 17. Переходная (а) и весовая (б) функции системы из примера 11
Для определения значений нулей и полюсов (т.е. корней числителя и знаменателя соответственно) передаточной функции служат функции zero(sys) и pole(sys), а для определения их расположения – функция pzmap(sys). Получение значений корней и их расположения для передаточной функции из примера 11 производится вставкой их в командный фай, приведенный в примере.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 551; Нарушение авторских прав?; Мы поможем в написании вашей работы!