КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управления
|
|
|
|
Общие сведения.
Система управления самолетом служит для обеспечения полета по заданной траектории путем создания на крыле и оперении потребных аэродинамических сил и моментов. Возможны три типа систем управления - неавтоматическая, полуавтоматическая и автоматическая.
В неавтоматической системе управления летчик, оценивая обстановку, обеспечивает выработку управляющих импульсов и с помощью командных рычагов через проводку управления отклоняет рулевые поверхности, удерживая их в нужном положении своей мускульной силой.
В полуавтоматической системе управляющие сигналы летчика преобразуются и усиливаются различного рода автоматами и усилителями, обеспечивая оптимальные характеристики устойчивости и управляемости самолета.
Автоматические системы обеспечивают полную автоматизацию отдельных этапов полета, освобождая летчика от непосредственного участия в управлении самолетом. Однако, и в этом случае предусматривается возможность перехода на ручное управление летчиком, для чего в кабине сохраняются обычные командные посты управления, связанные с рулями проводкой управления.
Основные требования к системе управления:
- углы отклонения рулевых поверхностей должны обеспечивать с некоторым запасом управление самолетом на всех требуемых режимах полета;
- усилия управления на командных рычагах должны быть направлены в сторону, противоположную их отклонению, плавно нарастать по мере отклонения и не превышать предельных величин - 500-600 Н в продольном, 300-350 Н в поперечном и 900-1050 Н в путевом управлении;
- максимальные перемещения командных рычагов должны лежать в строго заданных пределах и ограничиваться регулируемыми упорами;
- при управлении двумя рулями одним командным рычагом должна обеспечиваться независимость отклонения каждого руля;
- педали ножного управления должны иметь регулировку по росту пилота;
- проводка управления должна иметь: минимальные люфты в соединениях; силы трения не более 30-70 Н; защиту от повреждения, зажима, попадания на нее посторонних предметов;
- при деформациях крыла, фюзеляжа, оперения должна исключаться возможность заклинивания проводки управления;
- должны исключаться резонансные колебания тяг и тросов проводки управления;
- должно предусматриваться стопорение управления на стоянке.
Системы управления самолетом можно подразделить на:
- основную систему управления, предназначенную, главным образом, для изменения траекторий движения самолета, его балансировки и стабилизации на задаваемых режимах полета;
- дополнительные системы управления, предназначенные для управления двигателями, шасси, закрылками, тормозными щитками, воздухозаборниками, реактивным соплом и др.

Кабина пилотов
Ниже для упрощения изложения термин "Система управления самолетом" будем относить только к основной системе управления.
Система управления современным самолетом представляет собой совокупность электронно-вычислительных, электрических, гидравлических и механических устройств, обеспечивающих решение следующих задач:
- пилотирования самолета (изменение траекторий полета) летчиком в неавтоматическом и полуавтоматическом режимах;
- автоматического управления самолетом на режимах и этапах полета, предусмотренных ТТТ;
- создания достаточной мощности для отклонения органов управления;
- реализации на самолете необходимых (заданных) характеристик устойчивости и управляемости самолета;
- стабилизации установленных режимов полета;
- повышения безопасности полета путем своевременного оповещения экипажа о подходе к опасным (по скорости, высоте, перегрузкам, углам атаки, скольжения и крена и другим параметрам) режимам полета и выдачи команд на отклонение органов управления, препятствующих выходу на эти режимы.
Для изменения траектории движения самолета в полете нужно изменять действующие на него силы и моменты. Процесс изменения действующих на самолет сил и моментов, создаваемых отклонением в полете органов управления, называется процессом управления.
В зависимости от степени участия в процессе управления человека системы управления могут быть неавтоматическими, полуавтоматическими, автоматическими и комбинированными.
Командные посты управления.
Командные посты управления включают в себя рычаги управления, установленные в кабине экипажа, с помощью которых летчик отклоняет органы управления - рулевые поверхности или просто рули. В системе управления самолетом используются посты ручного и посты ножного управления.
Командные посты ручного управления.
Ручка управления. Продольным движением ручки "вперед-назад" отклоняется орган продольного управления - руль высоты или управляемый стабилизатор.
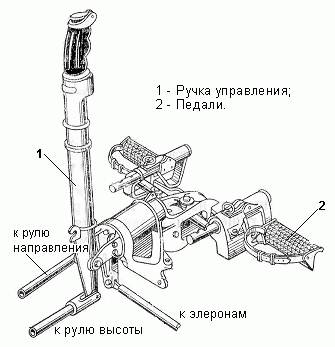
При отклонении ручки вперед - "от себя"- самолет поворачивается относительно поперечной оси на уменьшение угла атаки крыла, а при движении ручки "на себя" - угол атаки увеличивается. В результате изменения подъемной силы крыла происходит искривление траектории полета в ту или иную сторону.
Движением ручки вбок летчик отклоняет элероны и создает крен самолета в сторону движения ручки. Независимость отклонения элеронов и органов продольного управления обеспечивается правильным расположением осей вращения ручки "а-а", "b-b" и тяг управления 1 и 2.
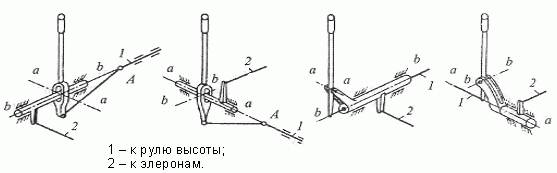
Показанные на этих схемах принципы обеспечения независимости отклонения элеронов и рулей высоты вполне очевидны и не требуют дополнительных пояснений.
Ручка управления обычно используется на маневренных самолетах, обеспечивая простоту и высокую чувствительность управления, что очень важно для таких самолетов.
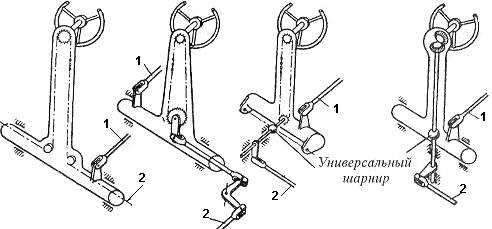
Штурвальная колонка.
Отклонением колонки "вперед-назад" управляют органами продольного управления. Отклонение колонки и движение самолета согласуется точно так же, как и при управлении ручкой. Поворотом штурвала влево или вправо обеспечивается отклонение элеронов и создается крен самолета в сторону вращения штурвала.
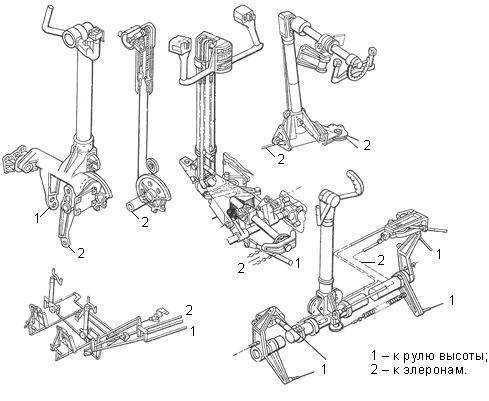
Независимость управления элеронами и рулем высоты обеспечивается выводом проводки управления от штурвала строго по оси вращения самой колонки. Жесткая проводка от штурвала на этой оси имеет универсальный шарнир.
На данной схеме 1 - проводка управления к рулю высоты, 2 - проводка к элеронам.
Командные посты ножного управления.
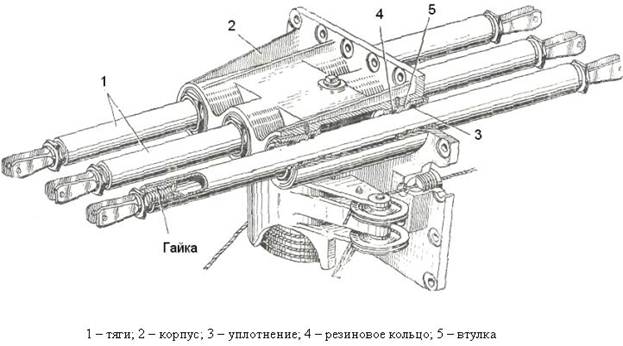
Посты ножного управления выполняются в виде педалей, закрепленных на горизонтально или вертикально расположенных рычагах. Еще одна разновидность - скользящие педали широкого распространения не получили.
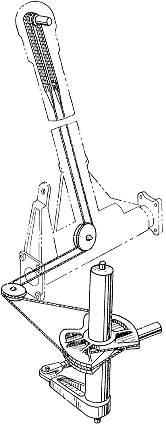
Педали с горизонтальными рычагами закрепляются на рычажно-параллелограммном механизме с вертикальной осью вращения.
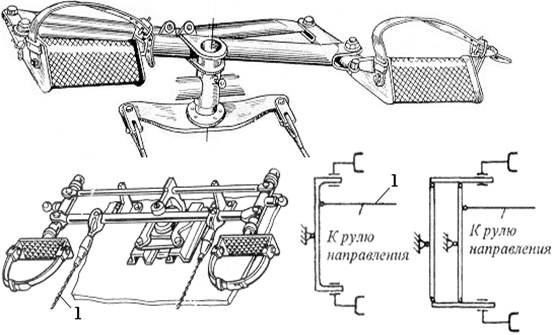
К основному горизонтальному рычагу присоединяется проводка управления 1 руля направления. Параллелограммный механизм обеспечивает поступательное движение педали и ноги летчика без их разворачивания. Для регулировки по росту подножки педалей переставляются относительно рычажного механизма и стопорятся специальными фиксаторами.
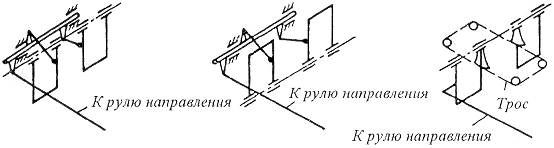
Педали с вертикальными рычагами выполняются в виде качающихся рычагов с горизонтальной осью вращения, которая располагается вверху или внизу.
Качающиеся педали с верхним расположением оси подвески закрепляются на опорах 3,12, 15 и поворачиваются относительно оси 7 в вертикальной плоскости.
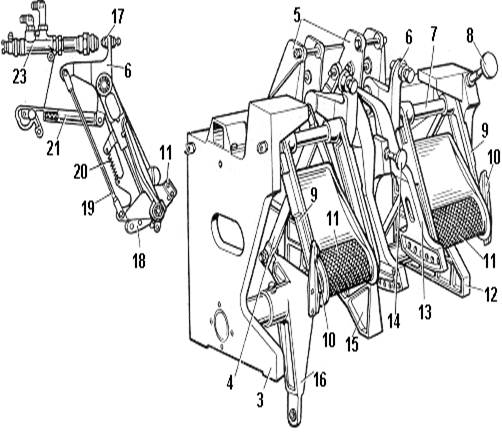
Усилие с педалей 11 тягами 4 передается на трехплечую качалку 16 и далее к рулю направления. Качалка 16 обеспечивает движение педалей в разные стороны за счет того, что тяги 4 от левой и правой педалей присоединяются к качалке 16 по разные стороны от оси ее вращения. Каждая педаль при отжатом фиксаторе 10 может переставляться относительно сектора 13, связанного с трехплечей качалкой 16, что обеспечивает регулировку педалей по росту. Нажатием носком ноги на верхнюю часть педали усилие тягой 19 передается на тормозной редукционный клапан 23, обеспечивая торможение колес шасси. На стоянке редукционные клапаны могут фиксироваться в нажатом положении кнопкой 8, обеспечивая стояночное торможение.
Качающиеся педали с нижним расположением оси вращения состоят из двух подножек 4, которые установлены на вертикальных рычагах 2, шарнирно закрепленных на кронштейне 12. Каждый рычаг связан тягами 1 с валом 14, к которому присоединяется тяга руля направления 15. Тяги 1 левой и правой педалей присоединяются к валу 14 по разные стороны от его оси вращения, что обеспечивает отклонение педалей в разные стороны.
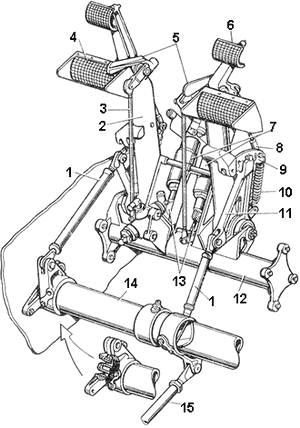
На каждой педали смонтированы тормозные подножки 6, передающие движение к тормозным редукционным клапанам 7. Для регулировки по росту отклонением вбок рукоятки 5 поднимается вверх регулировочная гребенка 9, связанная с рычагом педали, и штифт кронштейна 11 может переставляться в один из трех пазов регулировочной гребенки. При отпускании рукоятки 5 пружина 10 опускает гребенку вниз и обеспечивает соединение рычага педали с кронштейном 11.
Проводка управления.
Для передачи управляющих сигналов от командных рычагов летчика к органам управления используется механическая или электрическая проводка управления.
Механическая проводка управления.
В качестве механической проводки управления может использоваться гибкая, жесткая или смешанная проводка.
Гибкая проводка управления.
Выполняется в виде стальных тросов, которые на прямолинейных участках иногда заменяются металлическими лентами или проволокой. Тросы передают только растягивающую нагрузку, поэтому тросовая проводка состоит из двух ветвей, образующих замкнутую петлю, в которой создается предварительное натяжение для уменьшения упругих деформаций при передаче усилий управления. На прямолинейных участках тросы для уменьшения провисания поддерживаются пластмассовыми колодками с направляющими отверстиями (е).
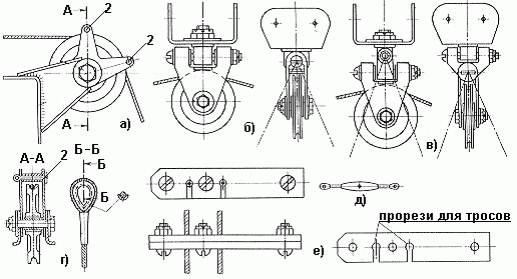
В местах изменения направления троса устанавливаются специальные ролики, снабженные шарикоподшипниками. Для уменьшения трения и деформаций троса угол охвата ролика тросом должен быть как можно меньше и не превышать 900. Чтобы тросы не соскакивали с роликов, на них устанавливаются ограничители 2. Регулировка натяжения тросов обеспечивается тандерами (д) - муфтами с двумя наконечниками, имеющими правую и левую резьбу. При вращении муфты происходит изменение натяжения троса.
 Тросовая проводка обладает малой массой и обеспечивает простоту прокладки ее в малых объемах. Но она обладает и многими существенными недостатками: большое упругое пружинение (упругие люфты) под нагрузкой; вытяжка в процессе эксплуатации, что требует частой регулировки натяжения; большое трение за счет деформации тросов при огибании роликов; зависимость силы натяжения троса от температуры и др. Из-за этих недостатков тросовая проводка в настоящее время используется редко, обычно на легких тихоходных самолетах или в комбинации с жесткой проводкой в тех местах, где использование последней затруднено. Например, в штурвальной колонке для передачи движения от штурвала к жесткой проводке за пределами штурвальной колонки.
Тросовая проводка обладает малой массой и обеспечивает простоту прокладки ее в малых объемах. Но она обладает и многими существенными недостатками: большое упругое пружинение (упругие люфты) под нагрузкой; вытяжка в процессе эксплуатации, что требует частой регулировки натяжения; большое трение за счет деформации тросов при огибании роликов; зависимость силы натяжения троса от температуры и др. Из-за этих недостатков тросовая проводка в настоящее время используется редко, обычно на легких тихоходных самолетах или в комбинации с жесткой проводкой в тех местах, где использование последней затруднено. Например, в штурвальной колонке для передачи движения от штурвала к жесткой проводке за пределами штурвальной колонки.
Для компенсации изменения натяжения тросов за счет их вытяжки или температурных деформаций конструкции в тросовую проводку включаются специальные пружинные регуляторы натяжения.
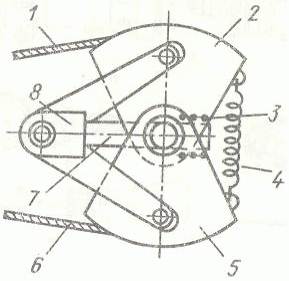
Регулятор состоит из двух секторов 2 и 5, соединенных с тросами.1 и 6, пружин 3 и 4, создающих в тросах натяжение, и механизма запирания секторов 8. Запирание осуществляется торможением центральной штанги 7 из-за ее перекоса в направляющих 8 при неодинаковых усилиях в тросах (передача управляющего усилия). При выравнивании усилий тросах перекос штанги 7 устраняется, и натяжение тросов обеспечивается пружинами.

Жесткая проводка управления.
Выполняется из движущихся поступательно жестких тяг, изготавливаемых из тонкостенных дюралевых, стальных, титановых труб с наконечниками на концах. Наконечники нерегулируемые и регулируемые (для регулировки длины тяги) обеспечивают соединение тяг между собой и присоединение их к качалкам и рычагам проводки управления. Для уменьшения трения все шарниры жесткой проводки снабжаются шарикоподшипниками. Параллельно всем шарнирам тяги и качалки управления гибкими перемычками 1 соединяются в одну электрическую массу во избежание возникновения между ними разности потенциалов. Раньше наконечники тяг крепились к трубам с помощью переходных стальных стаканов.
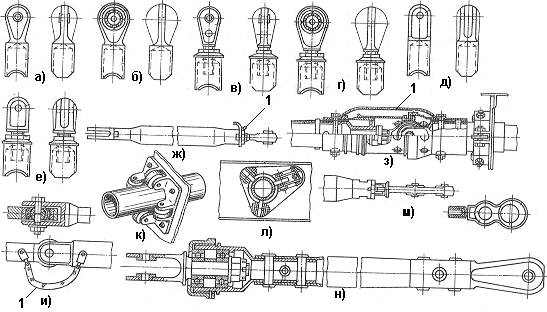
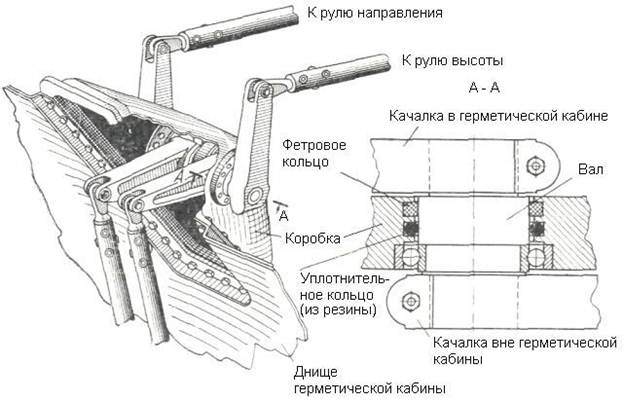
В соответствии с ГОСТ 1 12791-77 на трубы для тяг управления наконечники теперь ввертываются непосредственно в резьбу в обжатом конце трубы (ж, м) и установка промежуточных стаканов не требуется. Прокладка тяг по самолету выполняется или на поддерживающих качалках, или в роликовых направляющих (к). Для компенсации разницы в деформациях фюзеляжа и жесткой проводки управления в нее включается специальная компенсационная качалка, поворот которой в ту или иную сторону компенсирует изменение длины проводки и сохраняет заданное положение руля.
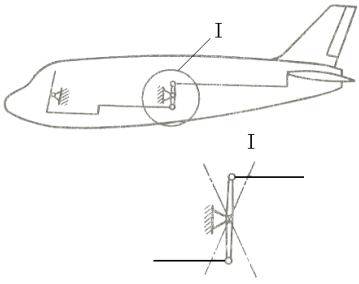
На выходе проводки управления из герметичных кабин устанавливаются специальные гермовыводы, обеспечивающие передачу движения проводки без утечки воздуха из гермоотсека. Уплотнение тяг или вала в этих узлах обеспечивается резиновыми уплотнительными кольцами.
Электрическая проводка управления.
Передача управляющих сигналов от летчика к органу управления может обеспечиваться электродистанционной системой управления (ЭДСУ).
Принцип действия.
В отличие от механических и бустерных систем управления, где воздействия от органов управления в кабине к управляющим поверхностям (элеронам, рулю высоты и т. д.) или силовым приводам передаются посредством механической проводки, включающей в себя тяги, качалки, тросы, шкивы и т. д., в ЭДСУ эти воздействия передаются с помощью электрических сигналов.
Механические перемещения рычагов управления в кабине самолёта с помощью установленных на них датчиков преобразуются в аналоговые или цифровые электрические сигналы, которые по электропроводке поступают в вычислитель системы управления. Одновременно туда же поступают сигналы от датчиков угловых скоростей, перегрузок, углов атаки и скольжения, вычислителя системы воздушных сигналов и других устройств. Вычислитель ЭДСУ в соответствии с заложенными в него алгоритмами управления преобразует эти сигналы во входные сигналы приводов органов управления. При этом он также может выполнять функции ограничителя предельных режимов полёта: не допускать превышения установленных ограничений по перегрузке, углу атаки и другим параметрам. Таким образом, значительно снижается вероятность попадания самолёта в нежелательные режимы полета: сваливание, штопор и т. д.
Для большинства важнейших систем самолёта ключевыми факторами обеспечения безопасности полёта являются надёжность их функционирования. Это относится и к ЭДСУ. На борту самолёта имеется несколько (обычно, четыре или более) параллельно работающих вычислителей с собственными датчиками, преобразователями и электропроводкой. Каждый вычислитель сравнивает свои сигналы с сигналами других и способен «проигнорировать мнение» вычислителя, который, судя по всему, выдает неверные данные. Питание вычислителей также дублируется. В результате вероятность полного отказа ЭДСУ пассажирских самолётов составляет менее 10 − 9, а военных — менее 10 − 7 на 1 час полёта, то есть такой отказ практически невозможен.
Исторически появление ЭДСУ было связано с переходом к статически неустойчивым компоновкам истребителей, которые позволяли получить ряд преимуществ по сравнению с обычными (снижение балансировочного сопротивления и массы фюзеляжа, и как следствие, увеличение экономичности; улучшение манёвренности). По ряду причин (люфт в механической проводке и др.) на таких самолётах невозможно было применить традиционную бустерную необратимую систему управления. Первые серийные истребители с аналоговой ЭДСУ — General Dynamics F-16, Су-27. (Один из первых — A-5 «Виджилент») Несколько позже ЭДСУ появились и на пассажирских самолётах (впервые — на Airbus A320 и Ту-204). Большинство более современных пассажирских и военных самолётов также оснащены такой системой управления.
Важной характеристикой ЭДСУ является её помехозащищённость. Влияние работающих бортовых систем и внешних электромагнитных воздействий на сигналы ЭДСУ должно приводить лишь к малым искажениям, не отражающимся на направленности её работы, и не должно приводить к появлению сигналов о ложных отказах. Для улучшения помехозащищённости применяются волоконно-оптические линии связи.
Для повышения надежности ЭДСУ передача электросигналов происходит по 3-4 независимым каналам, проложенным в разных местах конструкции тех агрегатов, по которым проходит проводка управления.
Электродистанционная проводка управления обеспечивает снижение массы системы управления, практически не требует объемов для ее прокладки, проста и удобна в обслуживании. ЭДСУ упрощает включение в систему управления любых автоматических устройств, не требуя установки дополнительных силовых приводов. Это позволяет создавать единую автоматизированную бортовую систему - АБСУ, обеспечивающую высокое качество управления на всех режимах полета самолета. В такой системе сигналы летчика и автоматов суммируются на электрическом уровне и выдаются на единый силовой привод органа управления.
Малый опыт использования ЭДСУ пока еще заставляет дублировать ее резервной механической проводкой управления, но уже появляются самолеты без дублирования с многократно резервированной и высоконадежной системой электрического управления.
Кинематика управления.
Кинематическая схема системы управления увязывает перемещения командных рычагов с требуемыми углами отклонения рулевых поверхностей. С точки зрения кинематики различают системы симметричного и системы дифференциального управления рулями.
Симметричное управление.
При симметричном управлении одинаковым отклонениям (перемещениям) командного рычага в обе стороны от нейтрального положения соответствуют одинаковые углы отклонения руля в ту и другую стороны. Такое управление всегда требуется в канале управления рулем направления, а также может использоваться и в каналах управления рулем высоты и элеронами.
Чтобы обеспечить симметричное управление следует придерживаться одного простого правила - все углы между тягами (тросами) и рычагами качалок должны быть прямыми – 90 градусов.
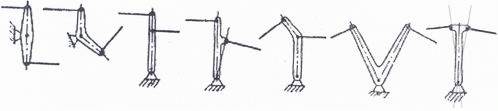
Это относится и к тягам, присоединяемым к командным рычагам, а также тягам, присоединяемым к кабанчику рулевой поверхности: угол между осью тяги и осью рычага кабанчика должен быть прямым.
Принципиальная схема симметричного управления показана на рисунке.
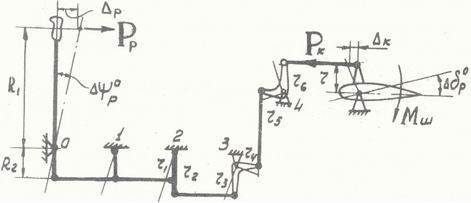
Дифференциальное управление.
Дифференциальное управление позволяет при одинаковых (симметричных) отклонениях командного рычага в обе стороны от нейтрального положения получать разные углы отклонения руля. Такая кинематика отклонения может использоваться в системах поперечного управления, обеспечивая больший угол отклонения элерона вверх по сравнению с углом отклонения вниз. В результате уменьшается возникающий при отклонении элеронов путевой момент, снижающий эффективность поперечного управления. Дифференциальное отклонение может иметь и руль высоты, у которого угол отклонения вверх всегда значительно больше угла отклонения вниз.
Простейшим механизмом дифференциального отклонения руля может служить двуплечая качалка, у которой угол между осью рычага и осью тяги отличен от прямого.
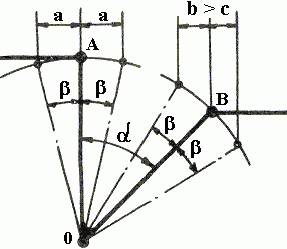
Степень дифференциальности отклонения руля определяется соотношением перемещений точки крепления рулевой тяги (В) в обе стороны от нейтрального положения при симметричном отклонении управляющей тяги летчика (А):

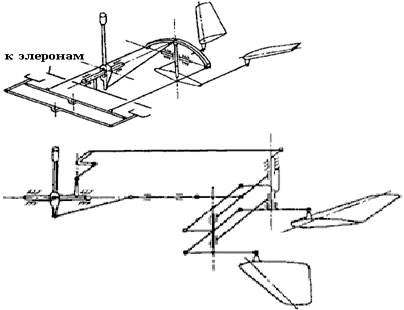
Управление комбинированными органами управления.
Комбинированные органы управления - элевоны, зависающие элероны, рули V-образного оперения и др. должны отклоняться управляющими сигналами двух независимых систем.
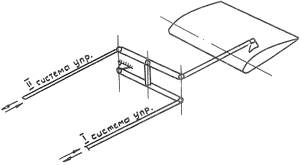
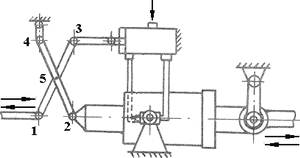
Независимая работа руля от двух систем обеспечивается включением в проводку управления специального смесительного механизма, показанного на рисунке, который обеспечивает отклонение руля как сигналами одной, так и сигналами другой системы.
Возможны и другие схемы управления комбинированными рулевыми поверхностями.
Один из них показан на следующем рисунке:
Усилия управления.
Усилие на командном рычаге управления может быть выражено через шарнирный момент на руле:
Pкр = Кш· mш · Sр · bр · q,
где Кш = dрmax/xрmax - коэффициент передачи от командного рычага к рулю,
dрmax - максимальный угол отклонения руля в радианах,
xрmax - максимальное перемещение командного рычага,
mш - коэффициент шарнирного момента руля,
Sр - площадь руля,
bр - хорда руля,
q - скоростной напор.
Коэффициент шарнирного момента при малых углах отклонения руля линейно зависит от величины этого угла. Отсюда следует, что в полете усилие на командном рычаге прямо пропорционально углу отклонения руля и величине скоростного напора.

Такая зависимость усилий вполне естественна для летчика. Она позволяет летчику по усилию судить о режиме полета, интенсивности выполняемого маневра, которая связана с перегрузкой в криволинейном полете. Практически при любом скоростном напоре перегрузка пропорциональна усилию на командном рычаге.
Возникающие в полете усилия управления можно разделить на балансировочные и маневренные.
Балансировочные усилия управления действуют в длительном установившемся режиме полета и обеспечивают уравновешивание (балансировку) самолета на этом режиме. Такие усилия лишь утомляют летчика и поэтому от них желательно избавиться.
Снятие балансировочных усилий с командных рычагов обеспечивается установкой на рулях триммеров - небольших поверхностей, шарнирно подвешенных в хвостовой части руля, и имеющих дополнительное, обычно электромеханическое, управление от летчика.
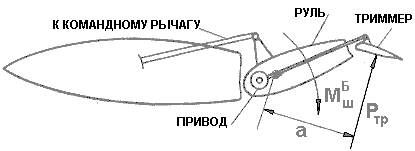
С помощью электрического переключателя летчик отклоняет триммер в сторону, противоположную отклонению руля и добивается полного уравновешивания шарнирного момента триммером. В результате будет достигнута балансировка самолета при нулевых усилиях на командных рычагах. В системах управления с необратимым бустером шарнирный момент руля полностью воспринимается этим бустером, а усилия на командных рычагах, в том числе и балансировочные, создаются специальными загрузочными механизмами. В этом случае триммеры на рулях не ставятся, а балансировочные усилия, приходящие от загрузочного механизма, снимаются специальным устройством, включенным в конструкцию загружателя.
Маневренные усилия управления возникают при выполнении самолетом кратковременных маневров. Эти усилия необходимы летчику для естественного чувства управления, по ним он судит о поведении самолета, интенсивности выполняемого маневра и перегрузке. Маневренные усилия должны укладываться в строго регламентированные нормы, выработанные длительной летной практикой. Для больших по размерам самолетов, для самолетов с большой скоростью полета приходится предусматривать специальные меры по снижению маневренных усилий.
Способы уменьшения маневренных усилий управления.
Основными средствами снижения усилий на командных рычагах являются устройства, позволяющие уменьшать коэффициент шарнирного момента mш. Для этого используется энергия набегающего потока воздуха, поэтому такие средства принято называть аэродинамической компенсацией рулей.
К аэродинамической компенсации относятся: роговая, осевая, внутренняя компенсации, а также простой или пружинный сервокомпенсатор.
Первые три вида компенсации используют общий принцип: часть поверхности руля располагается спереди от оси вращения руля и создает относительно этой оси момент, уменьшающий шарнирный момент руля.
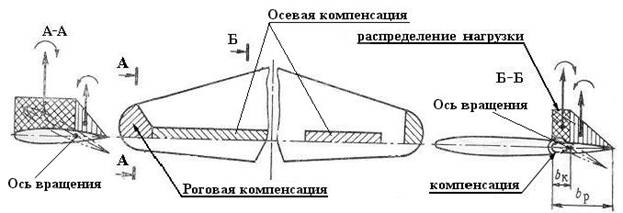
Роговая компенсация в настоящее время практически не применяется из-за большого сопротивления, создаваемого рогом при отклонении руля.
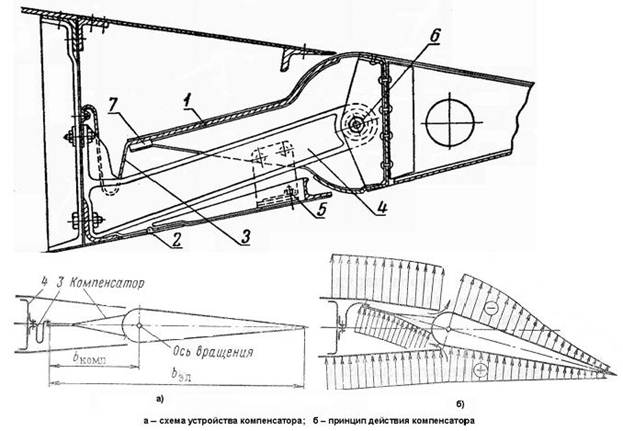
Внутренняя компенсация применяется на элеронах и представляет собой компенсатор большой площади, помещенный в камеру 1 с узкими щелями. Камера разделена гибкой перегородкой 3 на верхнюю и нижнюю полости. При отклонении элерона на компенсатор действует разница статических давлений в этих полостях, что уменьшает величину шарнирного момента элерона. Площадь компенсатора может составлять до 40% площади элерона, что уменьшает диапазон углов его отклонения. Основное преимущество внутренней компенсации - малый прирост лобового сопротивления крыла при отклонении элеронов.
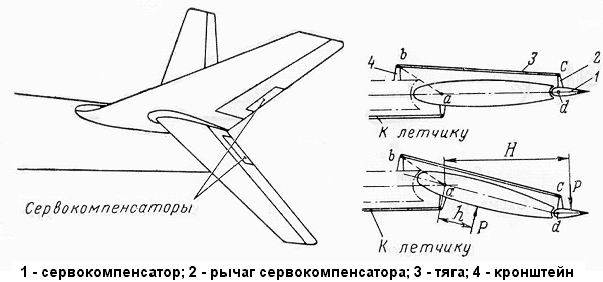
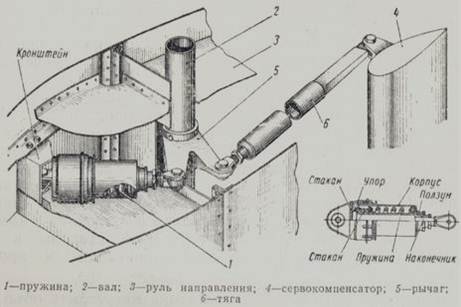
Сервокомпенсатор по размерам и конструкции аналогичен триммеру, но летчиком не управляется. Он отклоняется автоматически при отклонении руля за счет кинематической связи тягой с неподвижной точкой на конструкции, к которой подвешен руль. Отклонение сервокомпенсатора в противоположную рулю сторону уменьшает его шарнирный момент.
Такой сервокомпенсатор работает по углу отклонения руля, что иногда может привести к перекомпенсации и слишком малым усилиям управления. Более совершенным является пружинный сервокомпенсатор.
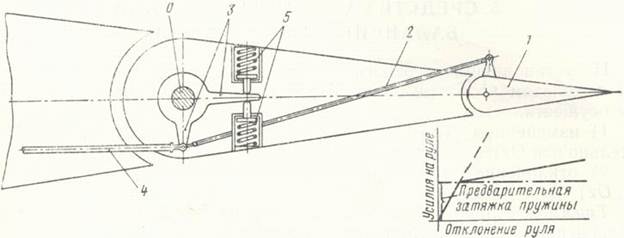
Сервокомпенсатор 1 тягой 2 соединен с двуплечим рычагом 3, к которому присоединена тяга управления 4 от командного рычага летчика. Рычаг 3 имеет возможность вращаться относительно оси 0, которая одновременно является и осью рулевой поверхности. Второе плечо рычага 3 зажато пружинами 5, имеющих предварительную затяжку. Пока усилие в тяге 4 не превышает усилия предварительной затяжки пружин, двуплечий рычаг 3 вращаться не будет и компенсатор 1 не работает - он отклоняется одновременно с рулем.Когда же усилие на руле превысит усилие затяжки пружин, рычаг 3 повернется и отклонит сервокомпенсатор относительно руля, уменьшая при этом шарнирный момент руля. Разгрузка, создаваемая пружинным сервокомпенсатором, пропорциональна не углу отклонения руля, а усилию в системе управления, что обеспечивает снижение максимальных усилий на любых режимах полета.
Другим принципом снижения усилий управления является уменьшение размеров руля без снижения эффективности управления. Этот принцип используется в системах управления с серворулями, в системах управления с интерцепторами, в системах продольного управления с подвижным стабилизатором.
В системах управления с серворулями летчик командными рычагами отклоняет вспомогательную поверхность - серворуль, который подвешен шарнирно в хвостовой части основного руля.
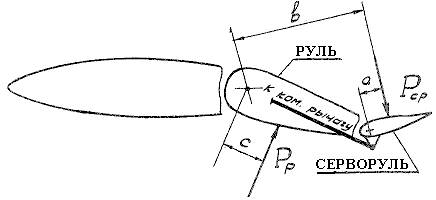
Его размеры в несколько раз меньше основного руля. Он отклоняется в сторону, противоположную по отношению к отклонению основного руля, который свободно закреплен на своей оси вращения. При отклонении серворуля возникающее на нем усилие Рср отклоняет руль в противоположную сторону до тех пор, пока не уравновесятся моменты Рср · b = Рр · с.
За счет разницы плеч "b" и "с" усилие на руле получается значительно больше усилия на серворуле, что и обеспечивает нужное движение самолета. Летчик на командном рычаге ощущает усилие от серворуля малых размеров. Основным недостатком такого управления является некоторое запаздывание в отклонении и работе основного руля.
Система управления с интерцепторами использует комбинацию интерцепторов с элеронами уменьшенных размеров, что обеспечивает снижение усилий управления. Интерцепторы отклоняются дополнительным приводом и их отклонение не влияет на усилия на штурвале. Отклонение интерцепторов повышает эффективность поперечного управления и компенсирует ее потери из-за уменьшения размеров элеронов.
Система управления с подвижным стабилизатором позволяет уменьшать размеры руля высоты и снижать усилия на его отклонение, а требуемая эффективность продольного управления на взлете и посадке обеспечивается перестановкой стабилизатора на меньший угол атаки. Угол отклонения стабилизатора изменяется дополнительным приводом, и летчик усилий на его отклонение не затрачивает.
Все перечисленные способы снижения усилий управления обеспечивают получение приемлемых усилий лишь на умеренных дозвуковых скоростях полета и у самолетов небольших размеров. На тяжелых и сверхзвуковых самолетах добиться нужных усилий управления можно лишь путем подвода в систему управления дополнительной энергии с помощью специальных усилителей - бустеров, которые частично или полностью воспринимают усилия от шарнирных моментов рулей.
Системы бустерного управления.
Система состоит из источника энергии, распределительного устройства, исполнительного механизма и обратной связи, передающей сигнал с выхода исполнительного механизма на вход распределительного устройства.
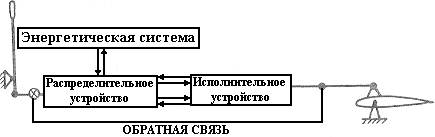
Три последних элемента выполняются в виде единого агрегата, называемого бустером и включаемого в проводку управления самолета между командным рычагом и рулем.
В качестве энергетической системы обычно используется гидросистема с постоянным рабочим давлением po. Поэтому иногда бустер называют гидроусилителем.
Основные элементы бустера.
Бустер состоит из распределительного устройства, исполнительного механизма и обратной связи.
Распределительное устройство представляет собой трехпозиционный четырехходовый цилиндрический или плоский золотниковый механизм с положительным перекрытием "с".
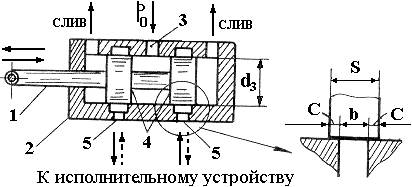
Плунжер золотника 1 через проводку управления перемещается командным рычагом летчика влево или вправо и открывает рабочие окна 5 в гильзе 2 (первая или вторая позиции золотника). Через одно окно жидкость из напорной магистрали 3 подается к исполнительному механизму, а через другое окно - жидкость от исполнительного механизма идет на слив. При перемещении золотника в другую сторону движение жидкости в окнах 5 меняется на обратное. Это обеспечивает движение исполнительного механизма в обе стороны.
При нейтральном положении золотника (3-я позиция) рабочие окна перекрываются рабочими поясками 4, обеспечивая фиксацию исполнительного механизма и руля в заданном положении.
В последнее время все более широкое применение находят золотники плоские, которые отличаются простотой изготовления и большей надежностью в работе по сравнению с золотниками цилиндрическими.

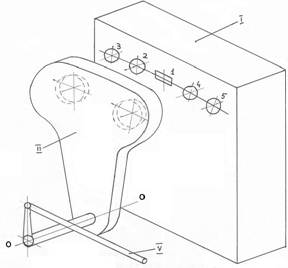
Такой золотник состоит из опорной плиты (I), плоского золотника (II), прижимной плиты (III) и пружин (IV), прижимающих золотник к опорной плите. Опорная плита неподвижна и имеет пять каналов: 1 - напорная магистраль; 2,4 - магистрали к исполнительному механизму; 3,5 - сливные магистрали.
Подвижный плоский золотник с помощью тяги (V) перемещается летчиком (или приводом автоматической системы управления), открывая рабочие окна 2 и 4. Жидкость из напорной магистрали направляется в одну из рабочих полостей исполнительного механизма, а вторая его полость сообщается со сливом, что обеспечивает перемещение штока исполнительного механизма в ту или иную стороны. При нейтральном положении золотника обеспечивается фиксация исполнительного механизма в заданном положении. Рабочие окна 1 (2,4) обычно имеют прямоугольное сечение, что обеспечивает получение линейной зависимости расхода жидкости по перемещению золотника.
Ниже показана принципиальная схема поворотного плоского золотника, используемого на самолете ТУ-154.
Летчик тягой (V) поворачивает золотник (II) относительно оси 0 - 0, управляя подачей жидкости к исполнительному механизму через окна в опорной плите (I). Валик, на котором закреплен золотник, выполняет роль гибкого звена - торсиона, обеспечивающего при заклинивании золотника перемещение проводки управления (V) для передачи движения к дублирующим бустерам.
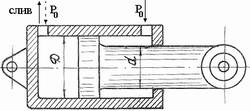
Исполнительный механизм выполняется в виде силового гидроцилиндра 1, внутри которого перемещается шток 2, 4, с поршнем 3.
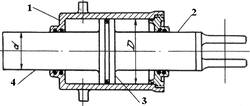
Жидкость под рабочим давлением от золотникового распределителя подается в левую или правую рабочие полости цилиндра и перемещает шток в ту или иную сторону. Противоположная полость в это время сообщается со сливом. Рабочий шток 2 соединяется непосредственно или через проводку управления с рулем. Ложный шток 4 обеспечивает равенство рабочих площадей поршня с обеих его сторон, что дает равные усилия и скорости движения штока в левую и в правую стороны. Иногда используются дифференциальные силовые цилиндры без ложного штока, что дает выигрыш в массе исполнительного механизма. В этом цилиндре полость со стороны штока всегда соединена с напорной магистралью и давление в ней в процессе работы не меняется.
Левая полость золотниковым распределителем сообщается либо с напорной магистралью, либо со сливом. В первом случае шток движется вправо (усилие на поршне слева больше, чем усилие справа), а во втором случае - влево (сила на штоке создается давлением жидкости на кольцевую площадь поршня справа. Равенство усилий при движении в обе стороны обеспечивается только при соотношении диаметров поршня и штока. В этом случае площадь поршня слева в два раза больше кольцевой площади справа, что и обеспечивает одинаковые усилия в ту и другую стороны.
Обратная связь обеспечивает получение следящей системы, при которой руль строго следит за перемещениями командного рычага летчика, выдерживая требуемый коэффициент передачи по перемещениям.Для получения следящей системы обратная связь должна быть отрицательной и жесткой.
Отрицательность обратной связи означает то, что при движении штока или цилиндра исполнительного механизма должно происходить закрытие рабочих окон в золотниковом механизме. Жесткость обратной связи обеспечивает прямую (линейную) пропорциональность закрытия окон по перемещению исполнительного механизма.
Самый простой способ получения обратной связи обеспечивается закреплением гильзы золотникового механизма на штоке (а), внутри которого проложены каналы от рабочих окон к рабочим полостям силового цилиндра. Иногда гильза золотника размещается внутри штока (б).
Управляющая тяга от летчика подходит к золотнику в точке 1. Ее перемещения открывают рабочие окна и вызывают перемещение штока вместе с гильзой. Шток с некоторым отставанием движется в ту же сторону, что и золотник. В конце движения, когда золотник останавливается, происходит полное закрытие рабочих окон и фиксация штока в новом положении. Перемещение штока копирует перемещение золотника, что и обеспечивает слежение руля за командным рычагом.
Более совершенный способ создания обратной связи обеспечивается установкой на входе в бустер дифференциальной качалки обратной связи.
В этом случае (а) перемещение управляющей тяги 1 поворачивает дифференциальную качалку относительно точки 2 и двигает золотник, который перемещается на величину большую, чем перемещение тяги, что ускоряет открытие окон и ускоряет движение штока, т.е. повышает быстродействие бустера. В конце движения точка 1 останавливается, и дифференциальная качалка поворачивается в обратную сторону до вертикального ее положения и закрытия рабочих окон. При этом закрытие рабочих окон происходит за счет встречного движения золотника и гильзы - т.е. ускорено. Это также повышает быстродействие бустера. Дифференциальная качалка может и замедлять работу золотникового механизма. Такое замедление может использоваться для устранения автоколебаний бустера. Замедленная работа золотникового механизма возможна в том случае, когда плечо l1 меньше l2. Кроме того, для устранения автоколебаний бустера иногда используют гидравлическое демпфирование золотника.
Возможны и другие способы получения обратной связи, например, через рычажную систему, работу которой предлагается разобрать самостоятельно.
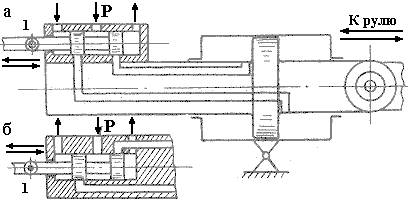
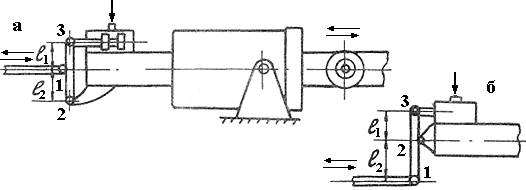
Способы включения бустера в систему управления.
Подводимая к бустеру от гидросистемы энергия позволяет при незначительных усилиях, затрачиваемых на преодоление сил трения в золотниковом механизме, получать любые нужные нам усилия на штоке бустера, обеспечивая отклонение руля при любых по величине и по знаку шарнирных моментах. Это свойство бустера можно использовать для формирования на командных рычагах летчика нормируемых усилий управления при любых размерах руля и любых скоростях полета.
Возможны два способа включения бустера в проводку управления - по обратимой или необратимой схеме.
Автоматизация систем управления самолетом.
Управление полетом современного самолета обеспечивается пилотом и специальными автоматическими системами, служащими для облегчения пилотирования, улучшения качества управления и повышения эффективности применения самолетов.
Обеспечение безопасности полетов современных самолетов требует проведения целого комплекса мероприятий, невозможных без их автоматизации. Например, сигнализации пилоту и автоматическое ограничение перемещений органов управления при выходе самолета на предельно допустимые в полете режимы (по V, M, вертикальным перегрузкам, углам атаки, крена и скольжения) с помощью, так называемых автоматов опасных режимов полета.
Специальные устройства системы управления улучшают характеристики устойчивости и управляемости самолета, особенно на больших высотах полета. С увеличением высоты полета и при сохранении скорости полета ухудшается ответная реакция самолета на отклонение рулей. Это затрудняет пилотирование самолета, ухудшает характеристики его устойчивости, ослабляет эффект затухания колебаний самолета. Пилот, пытаясь парировать возникшие колебания, может усилить их. Поэтому в цепи управления устанавливают специальные автоматы демпфирования и стабилизации полета, которые автоматически, без участия пилота, воздействуют на рулевые поверхности, отклоняя их так, чтобы улучшить эти характеристики.
Исполнительные механизмы таких автоматов часто выполняют в виде раздвижных тяг. Длина такой тяги автоматически изменяется при перемещении ее штока в зависимости от поведения самолета, оцениваемого чувствительным устройством (например, датчиками угловых скоростей вращения самолета, датчиками линейных ускорений и т.п.).
Управление двигателями современного самолета тоже должно быть автоматизировано. Точное соблюдение заданной траектории полета требует точного выдерживания скорости полета, а управление скоростью полета осуществляется автоматом тяги двигателей.
В связи с тем, что крылья современных сверхзвуковых самолетов имеют небольшую толщину, их жесткость оказывается относительно небольшой. Поэтому в полете могут возникнуть нежелательные упругие деформации конструкции, возможно возникновение опасных колебаний. Поэтому в систему управления самолетом включают специальные автоматы, предотвращающие возникновение излишних упругих деформаций, а также парирующие нежелательные колебания конструкции самолета, например, активно борющиеся с флаттером и др.
По этим причинам в систему управления современным самолетом включают специальную систему автоматического управления (САУ), обеспечивающую без участия пилота или под его контролем выполнение следующих функций:
- пилотирование самолета по заданному заранее или рассчитанному в полете маршруту, на заданной высоте и с заданной скоростью (автопилот);
- улучшение характеристик устойчивости и управляемости самолета (демпферы);
- управление двигателями (автомат тяги);
- повышение безопасности полета и эффективности применения самолета.
Рулевые машинки автопилота имеют прямое подключение в проводку управления, обеспечивая согласованное отклонение элементов управления и рычагов управления. Приводы демпферов имеют дифференциальное подключение в проводку управления, при котором отклоняются только элементы управления без отклонения рычагов управления. В этом случае контроль производится по индикаторам положения рулей и элеронов, а иногда и по индикаторам усилий на выходе рулевых машинок.
Современная САУ представляет очень собой сложный комплекс устройств, одним из звеньев которого является автопилот. Например, САУ современного сверхзвукового самолета включает следующие подсистемы:
- повышения устойчивости самолета;
- балансировки самолета по углу тангажа;
- стабилизации угловых движений и траекторного управления (разворотов, навигации и посадки);
- автоматического управления тягой двигателей;
- полуавтоматического управления (при пилотировании самолета пилотом);
- вычисления командных сигналов для взлета и ухода на второй круг.
Системы автоматической всепогодной посадки устроены так, что они объединяют сигналы радионаведения в автопилоте.
На всех этапах захода на посадку и посадки сигналы наведения поступают от курсо-глиссадных маяков и от высотного радиовысотомера, измеряющего высоту полёта во время выравнивания перед посадкой. Воздушной скоростью самолёта управляют с помощью автомата тяги.
Стопорение рулей и элеронов.
Во время стоянки на земле рули и элероны стопорятся с целью исключения их колебаний от ветровых нагрузок.
Чаще всего для стопорения рулей и элеронов используется механическая система непосредственного управления или электромеханическая система дистанционного управления, заканчивающаяся реверсивными электродвигателями с механизмом стопорения.
Принцип действия системы стопорения сводится к защемлению рулей и элеронов относительно планера. Для этого на рулях (элементах проводки управления) имеются гнёзда, в которые входят стопоры механизмов. Руль направления и элероны стопорятся в нейтральном положении или в положении правого крена, а руль высоты - в нижнем положении, что обеспечивает уменьшение кабрирующего момента при сильном ветре и страхует от самопроизвольного стопорения в полёте. Механизм стопорения благодаря конусу наконечника и дополнительной пружине позволяет ставить рычаг управления в положение "Застопорено" независимо от положения руля и элеронов. Последующее перемещение рулей и элеронов приводит к самостопорению.
При штормовом предупреждении стопорение рулей и элеронов производится с помощью струбцин. На некоторых самолётах с бустерной системой управления рули и элероны автоматически стопорятся рулевыми приводами.
|
|
|
|
Дата добавления: 2014-12-08; Просмотров: 8109; Нарушение авторских прав?; Мы поможем в написании вашей работы!