КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет параметров и выбор преобразователя
|
|
|
|
Условия выбора преобразователя частоты:
Uвых=380 В.
Рвых>=22 кВт.
Выбираем преобразователь частоты Hitachi SJ700-300HFE со следующими паспортными данными:
номинальная мощность 30 кВт
номинальный ток 58 А
диапазон частот 0.1 – 400 Гц ±0.01%
точность поддержания скорости ±0.5%
Преобразователь обеспечивает защиту двигателя с помощью электронного термореле.
Преобразователь обеспечивает торможение. Время разгона и торможения двигателя задается независимо друг от друга в интервале от 0.01 до 3600 секунд. Могут быть заданы два значения времени разгона и два значения времени торможения.
Также в преобразователе имеется встроенный регулятор тока и есть возможность организовать пропорциональный (П), пропорционально-интегральный (ПИ) или пропорционально- интегрально-дифференциальный (ПИД) регулятор скорости.
Для преобразователя не нужен трансформатор.
5 Расчет статических механических и электромеханических характеристик двигателя и привода
5.1 Расчет статических механической и электромеханической характеристик двигателя
Для асинхронного двигателя расчет статических механических характеристик ведется по формуле Клосса.
Величина критического скольжения находится по формуле:
 (5.1)
(5.1)
Формула для расчета механической характеристики имеет вид:
 (5.2)
(5.2)
где
 (5.3)
(5.3)
 (5.4)
(5.4)
Подставляя в формулу Клосса различные значения скольжения (угловой скорости), получаем ряд точек, по которым строим естественную механическую характеристику двигателя. Расчет механической характеристики двигателя проводим с помощью пакета Mathcad 2003
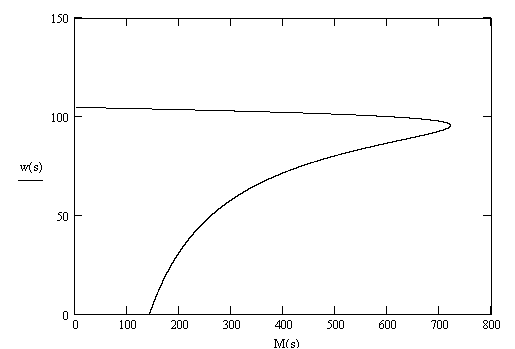
Рисунок 5.1 – График естественной механической характеристики.
Расчет электромеханической характеристики - зависимости тока статора I1 от скольжения S производится с использованием следующей формулы:
 (5.5)
(5.5)
 (5.6)
(5.6)
где
 (5.8)
(5.8)
 (5.9)
(5.9)
 (5.10)
(5.10)
Подставляя в эту формулу известные значения номинального тока статора, кратности максимального момента, критического скольжения и q, а так же различные значения скольжения (скорости), получаем различные значения тока ротора, по которым затем строится график электромеханической характеристики. Расчет электромеханической характеристики двигателя производим с помощью пакета Mathcad 2003.

Рисунок 5.2. – Электромеханическая характеристика двигателя
5.2 Расчет статических механических характеристик привода
Так как для регулирования скорости применяется ПИ – регулятор (будет показано ниже), который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой.

Рисунок 5.3. – Механические характеристики привода.
6 Расчет переходных процессов в электроприводе за цикл работы
Моделирование работы электропривода будем проводить в среде Mathlab 6.5.
Так как частота коммутации вентилей в преобразователе частоты очень велика (порядка 15000 Гц), то его постоянная времени очень мала и можно ей пренебречь. Преобразователь частоты при моделировании представим линейным звеном с коэффициентом передачи КПЧ.
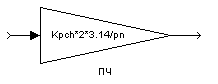
Рисунок 6.1 – Структурная схема преобразователя частоты.
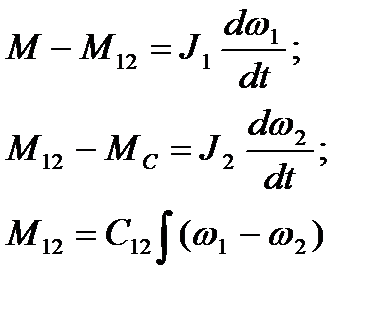
Мы имеем двухмассовую расчетную схему механической части. Выражения для двухмассовой расчетной схемы:
 (6.1)
(6.1)
Значение МС зависит от вида нагрузки. Так как нагрузка активная (потенциальная), то МС=Const.
Структурная схема двухмассовой расчетной схемы механической части представлена на рисунке 6.2:
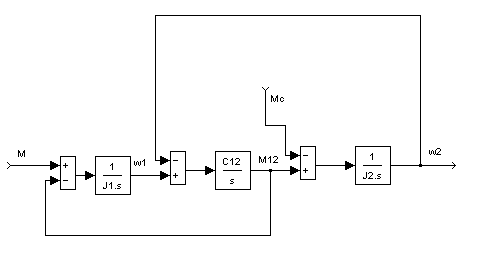
Рисунок 6.2 – Структурная схема механической части.
Для моделирования асинхронного двигателя используем линеаризованную модель:
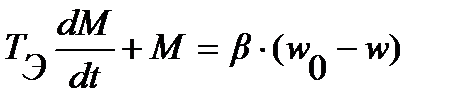 (6.2)
(6.2)
или в операторной форме:
 (6.3)
(6.3)
где  - жесткость характеристики, определяется по формуле:
- жесткость характеристики, определяется по формуле:
 ;(6.4)
;(6.4)
 - электромагнитная постоянная времени двигателя, определяется по формуле:
- электромагнитная постоянная времени двигателя, определяется по формуле:
 (6.5)
(6.5)
Схема линеаризованной модели асинхронного двигателя представлена на рисунке 6.3.
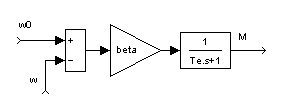
Рисунок 6.3 – Линеаризованная модель асинхронного двигателя.
Максимальное значение момента двигателя:
 (6.6)
(6.6)
Коэффициент передачи преобразователя по частоте определяется отношением максимального сигнала на выходе преобразователя к максимальному сигналу на выходе регулятора момента:
 (6.7)
(6.7)
Максимальное значение момента ограничения равно критическому моменту естественной характеристики двигателя:
 (6.8)
(6.8)

Из уравнения (6.3) находим Крм:
 (6.9)
(6.9)

Регулятор момента представляется в виде П–регулятора.
Предельное значение коэффициента усиления обратной связи, обеспечивающее регулирования момента с нулевой ошибкой:
 (6.10)
(6.10)

Для расчета контура скорости представим контур момента в виде звена:

 (6.11)
(6.11)
Обозначив
 ,
,
получим передаточную функцию оптимизированного контура регулирования момента:
 (6.12)
(6.12)
где 
Коэффициент передачи датчика отрицательной обратной связи по скорости рассчитывается как отношение напряжение задания на соответствующее значение максимальной скорости:
 (6.13)
(6.13)
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем  .
.
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть представлен в виде ПИ – регулятора.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
 (6.14)
(6.14)
Передаточная функция объекта регулирования:
 (6.15)
(6.15)
Разделив желаемую передаточную функцию контура скорости, на передаточную функцию объекта регулирования, получим передаточную функцию регулятора скорости:
 (6.16)
(6.16)
где
 ,
,
 (6.17)
(6.17)
Где  - суммарный момент инерции привода
- суммарный момент инерции привода

 (6.18)
(6.18)
 (6.19)
(6.19)
Расчет переходных процессов производятся в пакете Matlab 6.5.
Модель для исследования работы привода мостового крана приведена на рисунке 6.5:
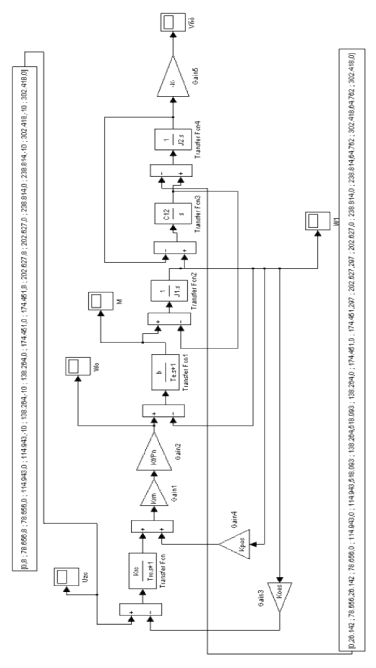
Рисунок 6.5 – Модель для исследования работы привода мостового крана.
7 Проверка правильности расчета мощности и окончательный выбор двигателя
Проверку правильности расчета мощности выполним методом средних потерь.
Полные номинальные потери в двигателе равны:
 (7.1)
(7.1)

Переменные номинальные потери в двигателе равны:
 (7.2)
(7.2)

Тогда постоянные потери будут равны:
 (7.3)
(7.3)

Средние потери за цикл работы равны:
 (7.4)
(7.4)
где  - потери в i-й момент времени,
- потери в i-й момент времени,
 - коэффициент ухудшения охлаждения при работе со скоростью
- коэффициент ухудшения охлаждения при работе со скоростью  ,
,
Тц=302 с. – время цикла.
Потери в i-й момент времени можно определить из следующего выражения:
 (7.5)
(7.5)
где
 ,
,
 - степень загрузки двигателя.
- степень загрузки двигателя.
Или
 (7.6)
(7.6)
Подставляя (7.6) в (7.4) получим:
 (7.7)
(7.7)
Используя выражения (7.7) найдем средние потери за цикл работы. Для нахождения средних потерь по формуле (7.7) воспользуемся моделью привода.
Сначала возводим в квадрат момент электромагнитный двигателя. Потом делим полученное значение на квадрат номинального момента и прибавляем  . Затем интегрируем полученное значение и умножаем на
. Затем интегрируем полученное значение и умножаем на  , получаем значение средних потерь за цикл работы.
, получаем значение средних потерь за цикл работы.
Модель для нахождения средних потерь за цикл работы представлена на рисунке 17.
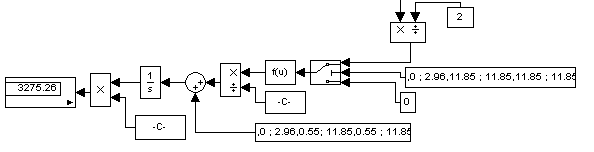
Рисунок 17 - Модель для нахождения средний потерь за цикл работы
В результате моделирования было получено, что средние потери за цикл работы равны:  .
.
Тогда коэффициент загрузки двигателя составляет:
 (7.8)
(7.8)
Следовательно, двигатель загружен на 84,32% (что больше 70%), поэтому окончательно выбираем данный двигатель.
8 Разработка схемы электрической принципиальной
Схема электрическая принципиальная привода приведена в графической части курсового проекта.
Преобразователь изображен на схеме в виде блока UZ1.
Входное напряжение на преобразователь подается через клеммы R, S и T. Двигатель подключается к клеммам U, V и W. К клеммам В1 и В2 подключается тормозной блок и блок тормозного резистора.
Необходимо обеспечить защиту электропривода от токов короткого замыкания.
Управление преобразователями частоты осуществляется посредством набора параметров, позволяющих осуществлять выбор, активизацию или, наоборот, запрет той или иной функции, задание значения параметра, а также контролировать текущее значение параметра. Параметры можно изменять и устанавливать кнопками клавиатуры пульта управления преобразователя, находящегося на передней панели.
Выбор элементов схемы
Автоматические выключатели выбираются по следующим критериям:
- по номинальному напряжению цепи;
Uном.авт ³ Uном;
где
Uном.авт – номинальное напряжение аппарата (В);
Uном - номинальное напряжение сети (В);
- Iуст.макс.расц. ³ (2,5 - 3)Iном.дв.;
где
Iуст.макс.расц. – ток уставки максимального расцепителя
Iном.дв. – номинальный ток двигателя;
Выбираем автоматический выключатель QF1:
Параметры автоматического выключателя:
серия ВА5735;
Iуст.макс.расц.(А) 250;
Uном = 380 В;
Количество полюсов 3;
количество вспомогательных контактов: 1 замыкающий; 1 размыкающий;
Заключение
В данном курсовом проекте необходимо было выбрать необходимый тип электропривода, выбрать двигатель для данного привода по рассчитанной мощности. Далее необходимо было построить схему управления и защиты для данного привода, выбрать элементы этих схем, рассчитать переходные процессы и определить правильно ли выбран двигатель. Так в данном курсовом проекте эквивалентный момент составил 99 процентов от номинального, то двигатель проходит по нагреву, причём мощность не завышена, что подтверждает правильность выбора.
Список литературы
1. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева, А.В. Шинянского. М.: Энергоатомиздат, 1983. 450 с.
2. Справочник по крановым электродвигателям / Под ред. В.М. Рабинович. М.: Энергоатомиздат, 1988. 318 с.
3. УДК 62 – 83 Теория электрического привода: Методические указания по курсовому проектированию. – ч.1 – Могилев: МГТУ, 2003. – 48с.
4. УДК 62 – 83 Теория электрического привода: Методические указания по курсовому проектированию. – ч.2 – Расчет статических характеристик электрических машин. – Могилев: МГТУ, 2003. – 47с.
|
|
|
|
|
Дата добавления: 2014-12-08; Просмотров: 1501; Нарушение авторских прав?; Мы поможем в написании вашей работы!