КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синтез кулачкового механизма
|
|
|
|
Кинематический анализ К.М.
Задача: определение закона движения выходного звена при заданном законе движения кулачка (например ω1 = const)
Существует 3 способа решения:
| 1) Экспериментальный | |
| 2) Графический | обычно основываются на методе инверсии |
| 3) Аналитический |
|
Общая постановка задачи: Даны законы движения кулачка и ведомого механизма. Требуется построить кинематическую схему механизма включая профиль кулачка.
1. Выбор типа механизма
Определяется общей компоновкой машины в состав которой входит к.м.
Механизм с коромыслом надежнее, но он уступает своими габаритами
2. Выбор закона движения ведомого звена
| Кулачковые механизмы: | А. Функциональные |
| Б. Позиционные |
Здесь необходимо учитывать два требования:
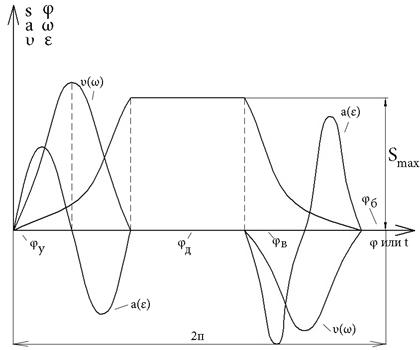
а) требования технологического процесса (φд φ φв φб φmax) и т.д.
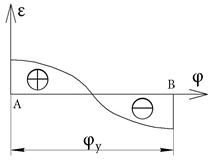
б) требования плавности и их безударной работы. Обычно задаются формой графика ускорения (или его аналога) ведомого звена:
из закона Ньютона:  или
или 
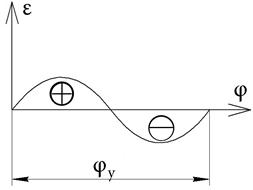
| F~a; M~b |
| ← пример безударного движения |
Необходимо помнить, что жесткие удары (скачки скорости) недопустимы, а мягкие удары (скачки ускорения) в тихоходном механизме допускаются.
|
3. Выбор основных размеров механизма
Основные размеры: для механизма с толкателем
 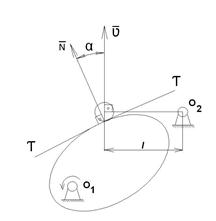
| ro, l Для механизма с коромыслом ro, l = O2C – расстояние между точками качения коромысла и участком ролика (обычно определяют исходя из компоновки); L=O1O2 – расстояние между центром вращения кулачка и коромысла Rролика ≤ 0,7 R (кривизны) |
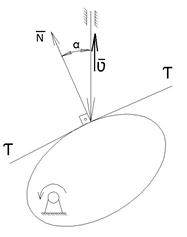
Указанные размеры должны определяться с учетом условия оптимального угла давления α
 (1) (1)
| [α] = 30о – с толкателем |
| [α] = 45о – с коромыслом |
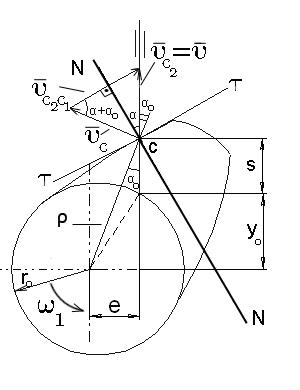
Связь между основными размерами и α
(на примере механизма с толкателем)
N-N – нормаль к поверхности кулачка в точке касания
τ-τ – касательная к поверхности кулачка в точке касания
| Из ∆ скоростей
 следует, что следует, что
 учитывая, что учитывая, что
 получим получим
 Из рисунка видно, что
Из рисунка видно, что  ,
А ,
А  тогда тогда

 (2) (2)
|
Знак “-” соответствует положительному значению эксцентриситета
 - является аналогом скорости толкателя и не зависит от ω1, т.к.
- является аналогом скорости толкателя и не зависит от ω1, т.к.
Выбор значений ro и e с учетом (1) и (2) можно произвести с помощью графических построений. На примере К.М. с толкателем при силовом замыкании (нас интересует только фаза удаления, т.к. на фазе возврата сила не приводит к заклиниванию, для К.М. с геометрическим замыканием указанное ниже построении надо проделать и для фазы возврата).
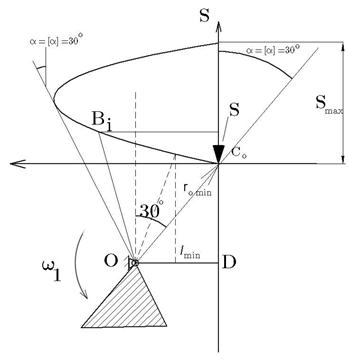
| Подробно построение можно выполнить и для К.Н. с коромыслом, в этом случае α = [α] = 45o |
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 635; Нарушение авторских прав?; Мы поможем в написании вашей работы!