КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие о КПД машинного агрегата
|
|
|
|
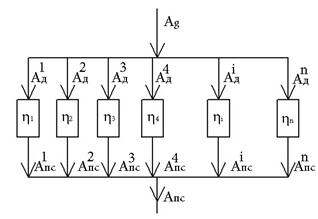
Для характеристики установившегося режима вводится важное понятие. Чтобы определить его рассмотрим более подробно работу Ас, которую совершают силы сопротивления. Очевидно что Ас состоит из работы которую совершают силы полезного сопротивления Апс (для преодоления которых и создана машина), а также работы, которую совершают силы трения в кинематических парах и сила сопротивления среды Ат .
Ас = Апс + Ат. Из вышесказанного следует (см. понятие цикла работы)
Ag = Aпс + Ат (1)
Или
1 = η + ξ (2)
Где  - механический КПД машинного агрегата
- механический КПД машинного агрегата
 - механический коэффициент потерь МА
- механический коэффициент потерь МА
Из (2) следует, что 0 ≤ η < 1, 0 < ξ ≤ 1, где знак = относится к режиму холостого хода (т.е. нет полезной нагрузки)
КПД – важная характеристика машины, так как в среднем показывает насколько она экономична, энергетически целесообразна. Поскольку точное определение η зависит от точности определяемых сил трения или сопротивления среды (а это достаточно сложно), его величина находится, как правило экспериментально.
Только для некоторых простых механизмов можно теоретически определить КПД
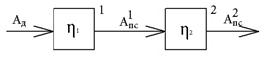
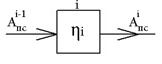
Если МА можно представить в виде совокупности простых механизмов (или механизмов с известным КПД), соединенных последовательно, параллельно или смешанным образом, возможна теоретическая оценка его общего КПД
А) Последовательное соединение
| 
| 
|
Из определения следует:
 ,
,  ,
, 
Где  - КПД всей машины; 1 – КПД первого механизма; i – КПД i-го механизма;
- КПД всей машины; 1 – КПД первого механизма; i – КПД i-го механизма;
С другой стороны, очевидно, что

Окончательно
 (3)
(3)
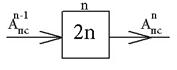
Б) Параллельное соединение
|
 (4)
(4)
В зависимости от того какую работу легче определить на практике (4) можно представить
 или
или  (5)
(5)
Если схема машинного агрегата представляет собой цепь последовательных и параллельных соединений то пользуются зависимостями (3) и (5)
На практике работу определить значительно сложнее, и лучше оперировать понятием «мощность механизма» N (работа в единицу времени)
Тогда имеем зависимость для КПД аналогичные (3) и (5) только вместо А имеем N
1. Исследование движения машинных агрегатов под действием сил и моментов
Постановка задачи:
Любой машинный агрегат можно представить в виде блок-схемы

|
Задача исследования движения МА является задачей отыскания действительного закона движения звеньев МА, который бы учитывал не только действие на него внешних сил и моментов, но также и взаимное влияние механизмов входящих в машинный агрегат.
Существует 2 пути решения задачи:
1.Разбиение всего МА на отдельные звенья, составление уравнений движения этих звеньев (в форме уравнений Лагранжа 2-го рода или второго закона Ньютона) и решение полученной системы дифференциальных уравнений. Этот способ применяется для исследования для исследования динамики конкретных машин. Решение очень сложное, т.к. эта система нелинейных дифференциальных уравнений и в правой части содержатся неизвестные реакции связей, действующие в кинематических парах.
2.Второй путь основан на рассмотрении МА как некоторой дискретной механической системы, обладающей несколькими степенями свободы. Для подавляющего большинства МА ω=1. Для них целесообразна замена МА некоторой условной механической системой с одной степенью свободы. Эта условная механическая система, с ω=1, получила название динамической модели МА (расчетная схема для решения поставленной задачи) или звена приведения.
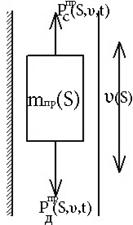
Рассмотрим виды динамических моделей МА с одной степенью свободы.
Для плоских механизмов в расчетной практике используется 2 вида моделей. Эти модели применяются в зависимости от того какое движение совершает звено приведения: вращательное или поступательное. Условные параметры обозначенные на рисунке получили название приведенных параметров.

| 
|
Искомые функции, характеризующие закон движения звена приведения ω, v. Наиболее удобно в качестве звена приведения выбирать звено МА, движение которого описывается одной обобщенной координатой (это, как правило входное звено). В этом случае можно сразу найти его реальный закон движения, а далее, реальные законы движения остальных звеньев
Рассмотрим как находятся приведенные параметры моделей представленных выше:
Для определения приведенных инерциальных параметров Jпр; mпр используют равенство кинетической энергии звена приведения и кинетической энергии реальной машины:
Eпр = Eр.м. (1)
Для 1-ой модели:
 ,
,  (2)
(2)
Где Ei – кинетическая энергия i-го звена машины. В общем случае звено совершает плоскопараллельное движение, поэтому
 (3)
(3)
Первое слагаемое определяет кинетическую энергию звена в поступательном и второе во вращательном движении относительно полюса, в выражении (3) за полюс выбран центр тяжести i-го звена Si, так как в этом случае просто определить момент инерции звена Jsi, а mi, v si, ωi - соответствующая масса, скорость полюса, абсолютная угловая скорость i-го звена. Подставляя соотношения (2), (3) в (1) получим:
 (4)
(4)
Из (4) следует, что Jпр является только функцией положения при постоянных mi и Jsi. Аналогично для второй модели получим, учитывая что 
 (5)
(5)
Приведенные силовые параметры ( ) находятся из условия равенства элементарных работ совершаемых приведенными силовыми параметрами и внешними силами и моментами, действующими на звенья агрегаты:
) находятся из условия равенства элементарных работ совершаемых приведенными силовыми параметрами и внешними силами и моментами, действующими на звенья агрегаты:
dАпр = dАрн (6)
Для 1-ой модели:
 ;
;  (7)
(7)
Для машин в общем случае удобнее оперировать не с работой, а с мощностью (как отмечалось уже ранее), поэтому поделим (7) на dt и получим
 (8)
(8)
Мощность Ni, развиваемую силами приложенными к i-му звену, представим
 (9)
(9)
Где Pi – сила, действующая на i-е звено, v i – скорость точки приложения силы Pi, αi – угол между ними; Mi – момент сил, действующий на i-е звено. Подставляя (7), (8), (9) в (6) находим
В общем случае из (10) следует, что Mпр является функцией положения (φ) и Pi и Mi, которые, в свою очередь, являются функциями t; φ; ω т.е. Мпр=f(φ,ω,t)
Аналогично получим приведенную движущую силу или силу сопротивления
В качестве примера рассмотрим простейший машинный агрегат, где за звено приведения примем кривошип 1, учитывая (4) получим:

|
 , где
, где
Jэд, Jz1, Jz2, Js1, Js2 – моменты инерции ротора эд.дв., зубчатых колес z1, z2,
Звенья 1,2 относит. Центров тяжести; m2,m3 – массы 2,3 звеньев, точка S1 совпадает с O
Учитывая (10) имеем:
(движущих сил) 
сил сопротивления

|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1013; Нарушение авторских прав?; Мы поможем в написании вашей работы!