КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Силовые линии магнитного поля
|
|
|
|
МАГНИТНОЕ ПОЛЕ. ОСНОВЫ ФЕРРОЗОНДОВОГО КОНТРОЛЯ
Мы живем в магнитном поле земли. проявлением магнитного поля является то, чтострелка магнитного компаса постоянно показывает направление на север. тот же результат можно получить, располагая стрелку магнитного компаса между полюсами постоянного магнита (рисунок 34).
Рисунок 34 — Ориентация магнитной стрелки около полюсов магнита
Обычно один из полюсов магнита (южный) обозначают буквой S, другой — (северный) — буквой N. На рисунке 34 изображены два положения магнитной стрелки. В каждом положении разноименные полюса стрелки и магнита притягиваются. Поэтому направление стрелки компаса изменилось, как только мы ее сдвинули из положения 1 в положение 2. Причиной притяжения к магниту и поворота стрелки является магнитное поле. Поворот стрелки при ее смещении вверх и вправо показывает, что направление магнитного поля в разных точках пространства не остается неизменным.
На рисунке 35 показан результат опыта с магнитным порошком, насыпанным на лист плотной бумаги, который расположен над полюсами магнита. Видно, что частицы порошка образуют линии.
Частицы порошка, попадая в магнитное поле, намагничиваются. У каждой частицы появляются северный и южный полюсы. Расположенные рядом частицы порошка не только поворачиваются в поле магнита, но и прилипают друг к другу, выстраиваясь в линии. Эти линии принято называть силовыми линиями магнитного поля.
Рисунок 35 Расположение частиц магнитного порошка на листе бумаги, расположенном над полюсами магнита
Помещая магнитную стрелку вблизи такой линии, можно заметить, что стрелка располагается по касательной. Цифрами 1, 2, 3 на рисунке 35 показана ориентация магнитной стрелки в соответствующих точках. Вблизи полюсов плотность магнитного порошка больше, чем в других точках листа. Это означает, что величина магнитного поля там имеет максимальное значение. Таким образом, магнитное поле в каждой точке определяется значением величины, характеризующей магнитное поле, и ее направлением. Такие величины принято называть векторами.
Расположим стальную деталь между полюсами магнита (рисунок 36). Направление силовых линий в детали показано стрелками. В детали также возникнут силовые линии магнитного поля, только их будет намного больше, чем в воздухе.

Рисунок 36 Намагничивание детали простой формы
Дело в том, что стальная деталь содержит железо, состоящее из микромагнитов, которые называются доменами. Приложение к детали намагничивающего поля приводит к тому, что они начинают ориентироваться в направлении этого поля и усиливают его во много раз. Видно, что силовые линии в детали параллельны друг другу, при этом магнитное поле постоянно. Магнитное поле, которое характеризуется прямыми параллельными силовыми линиями, проведенными с одинаковой плотностью, называется однородным.
10.2 Магнитные величины
Важнейшей физической величиной, характеризующей магнитное поле, является вектор магнитной индукции, который принято обозначать В. Для каждой физической величины принято указывать ее размерность. Так, единицей силы тока является Ампер (А), единицей магнитной индукции — Тесла (Тл). Магнитная индукция в намагниченных деталях обычно лежит в интервале от 0,1 до 2,0 Тл.
Магнитная стрелка, помещенная в однородное магнитное поле, будет поворачиваться. Момент сил, поворачивающий ее вокруг оси, пропорционален магнитной индукции. Магнитная индукция характеризует также степень намагниченности материала. Силовые линии, показанные на рисунках 34, 35, характеризуют изменение магнитной индукции в воздухе и материале (детали).
Магнитная индукция определяет магнитное поле в каждой точке пространства. Для того, чтобы характеризовать магнитное поле на какой–то поверхности (например, в плоскости поперечного сечения детали), используется еще одна физическая величина, которая называется магнитным потоком и обозначается Φ.
Пусть однородно намагниченная деталь (рисунок 36) характеризуется значением магнитной индукции В, площадь поперечного сечения детали равна S, тогда магнитный поток определяется по формуле:
Φ = BS. (10.1)
Единица магнитного потока — Вебер (Вб).
Рассмотрим пример. Магнитная индукция в детали равна 0,2 Тл, площадь поперечного сечения — 0,01 м2. Тогда магнитный поток равен 0,002 Вб.
Поместим длинный цилиндрический железный стержень в однородное магнитное поле. Пусть ось симметрии стержня совпадает с направлением силовых линий. Тогда стержень будет почти везде намагничен однородно. Магнитная индукция в стержне будет много больше, чем в воздухе. Отношение магнитной индукции в материале Bм к магнитной индукции в воздухе Вв называется магнитной проницаемостью:
μ=Bм / Bв. (10.2)
Магнитная проницаемость является безразмерной величиной. Для различных марок стали магнитная проницаемость лежит в интервале от 200 до 5 000.
Магнитная индукция зависит от свойств материала, что затрудняет технические расчеты магнитных процессов. Поэтому была введена вспомогательная величина, которая не зависит от магнитных свойств материала. Она называется вектором напряженности магнитного поля и обозначается H. Единица напряженности магнитного поля — Ампер/метр (А/м). При неразрушающем магнитном контроле деталей напряженность магнитного поля изменяется от 100 до 100 000 А/м.
Между магнитной индукцией В в и напряженностью магнитного поля Н в воздухе существует простая зависимость:
В в=μ0H, (10.3)
где μ0 = 4π 10 –7 Генри/метр — магнитная постоянная.
Напряженность магнитного поля и магнитная индукция в материале связаны между собой соотношением:
B=μμ0H (10.4)
Напряженность магнитного поля Н — вектор. При феррозондовом контроле требуется определять составляющие этого вектора на поверхности детали. Эти составляющие можно определить, пользуясь рисунком 37. Здесь поверхность детали принята за плоскость xy, ось z перпендикулярна этой плоскости.
На рисунке 1.4 из вершины вектора H опущен перпендикуляр на плоскость x,y. В точку пересечения перпендикуляра и плоскости из начала координат проведен вектор H который называется тангенциальной составляющей напряженности магнитного поля вектора H. Опустив перпендикуляры из вершины вектора H на оси x и y, определим проекции Hx и Hy вектора H. Проекция H на ось z называется нормальной составляющей напряженности магнитного поля Hn. При магнитном контроле чаще всего измеряют тангенциальную и нормальную составляющие напряженности магнитного поля.
Рисунок 37 Вектор напряженности магнитного поля  и его проекции на поверхности детали
и его проекции на поверхности детали
10.3 Кривая намагничивания и петля гистерезиса
Рассмотрим изменение магнитной индукции первоначально размагниченного ферромагнитного материала при постепенном возрастании напряженности внешнего магнитного поля. График, отражающий эту зависимость, показан на рисунке 38 и называется кривой начального намагничивания. В области слабых магнитных полей наклон этой кривой сравнительно невелик, а затем он начинает возрастать, достигая максимального значения. При еще больших значениях напряженности магнитного поля наклон уменьшается так, что изменение магнитной индукции с ростом поля становится незначительным — происходит магнитное насыщение, которое характеризуется величиной BS. На рисунке 39 показана зависимость магнитной проницаемости от напряженности магнитного поля. Для этой зависимости характерны две величины: начальная μн и максимальная μм магнитная проницаемость. В области сильных магнитных полей проницаемость падает с ростом поля. При дальнейшем увеличении внешнего магнитного поля намагниченность образца практически не изменяется, а магнитная индукция растёт только за счёт внешнего поля.
Рисунок 38 Кривая первоначального намагничивания
Рисунок 39 Зависимость проницаемости от напряженности магнитного поля
Магнитнаяиндукция насыщения BS зависитв основномот химического состава материала и для конструкционных и электротехнических сталей составляет 1,6—2,1 Тл. Магнитная проницаемость зависит не только от химического состава, но и от термической и механической обработки.
. 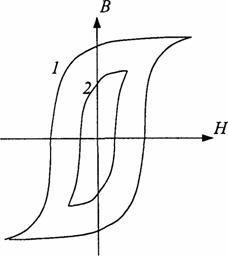
Рисунок 40 Предельная (1) и частная (2) петли гистерезиса
По величине коэрцитивной силы магнитные материалы разделяют на магнитомягкие (Hc < 5 000 А/м) и магнитотвердые (Hc > 5 000 А/м).
Для магнитомягких материалов требуются сравнительно малые поля для получения насыщения. Магнитотвердые материалы трудно намагнитить и перемагнитить.
Большинство конструкционных сталей являются магнитомягкими материалами. Для электротехнической стали и специальных сплавов коэрцитивная силасоставляет 1—100 А/м, для конструкционных сталей — не более 5 000 А/м. В приставных устройствах с постоянными магнитами используются магнитотвердые материалы.
При перемагничивании материал вновь насыщается, но значение индукции имеет другой знак (– BS), соответствующий отрицательной напряженности магнитного поля. При последующем увеличении напряженности магнитного поля в сторону положительных значений индукция будет изменяться по другой кривой, называемой восходящей ветвью петли. Обе ветви: нисходящая и восходящая, образуют замкнутую кривую, называемую предельной петлей магнитногогистерезиса. Предельная петля имеет симметричную форму и соответствует максимальному значению магнитной индукции равному BS. При симметричном изменении напряженности магнитного поля в меньших пределах индукция будет изменяться по новой петле. Эта петля полностью располагается внутри предельной и называется симметричной частной петлей (рисунок 40).
Параметры предельной петли магнитного гистерезиса играют важную роль при феррозондовом контроле. При высоких значениях остаточной индукции и коэрцитивной силы возможно проведение контроля путем предварительного намагничивания материала детали до насыщения с последующим отключением источника поля. Намагниченность детали будет достаточной для выявления дефектов.
Вместе с тем явление гистерезиса приводит к необходимости контроля магнитного состояния. При отсутствии размагничивания материал детали может оказаться в состоянии, соответствующем индукции – Br. Тогда, включив магнитное поле положительной полярности, например, равное Hc, можно даже размагнитить деталь, хотя предполагается, что мы ее намагничиваем.
Важное значение имеет также магнитная проницаемость. Чем больше μ, тем меньше требуемое значение напряженности магнитного поля для намагничивания детали. Поэтому технические параметры намагничивающего устройства должны быть согласованы с магнитными параметрами объекта контроля.
10.4 Магнитное поле рассеяния дефектов
Магнитное поле дефектной детали имеет свои особенности. Возьмем намагниченное стальное кольцо (деталь) с узкой щелью. Эту щель можно рассматривать как дефект детали. Если накрыть кольцо листом бумаги с насыпанным магнитным порошком, можно увидеть картину, сходную с приведенной на рисунке 35. Лист бумаги расположен вне кольца, а между тем частицы порошка выстраиваются вдоль определенных линий. Таким образом, силовые линии магнитного поля частично проходят вне детали, обтекая дефект. Эта часть магнитного поля называется полем рассеяния дефекта.
На рисунке 41 показана длинная трещина в детали, расположенная перпендикулярно силовым линиям магнитного поля, и картина силовых линий вблизи дефекта.
Рисунок 41 Обтекание силовыми линиями поверхностной трещины
Видно, что силовые линии магнитного поля обтекают трещину внутри детали и вне ее. Формирование магнитного поля рассеяния подповерхностным дефектом можно пояснить с помощью рисунка 42, где изображен участок намагниченной детали. Силовые линии магнитной индукции относятся к одному из трех участков поперечного сечения: над дефектом, в зоне дефекта и под дефектом. Произведение магнитной индукции на площадь поперечного сечения определяет магнитный поток. Составляющие полного магнитного потока на этих участках обозначены как Φ1,.., Часть магнитного потока Ф2, будет перетекать выше и ниже сечения S2. Поэтому магнитные потоки в сечениях S1 и S3 будут больше, чем у бездефектной детали. То же самое можно сказать и о магнитной индукции. Другой важной особенностью силовых линий магнитной индукции является их искривление над и под дефектом. В результате часть силовых линий выходит из детали, создавая магнитное поле рассеяния дефекта.
3. 
Рисунок 42 Поле рассеяния подповерхностного дефекта
Количественно магнитное поле рассеяния можно оценить по магнитному потоку, выходящему из детали, который называют потоком рассеяния. Магнитный поток рассеяния тем больше, чем больше магнитный поток Φ2 в сечении S2. Площадь поперечного сечения S2 пропорциональна косинусу угла , показанному на рисунке 42. При = 90° эта площадь равна нулю, при =0° она имеет наибольшее значение.
Таким образом, для выявления дефектов необходимо, чтобы силовые линии магнитной индукции в зоне контроля детали были бы перпендикулярны плоскости предполагаемого дефекта.
Распределение магнитного потока по сечению дефектной детали аналогично распределению потока воды в русле с преградой. Высота волны в зоне полностью погруженной преграды будет тем больше, чем ближе гребень преграды к поверхности воды. Аналогично этому подповерхностный дефект детали тем легче обнаружить, чем меньше глубина его залегания.
10.5 Обнаружение дефектов
Для обнаружения дефектов требуется прибор, позволяющий определить характеристики поля рассеяния дефекта. Это магнитное поле можно определить по составляющим Нх, Ну, Нz.
Однако поля рассеяния могут быть вызваны не только дефектом, но и другими факторами: структурной неоднородностью металла, резким изменением сечения (в деталях сложной формы), механической обработкой, ударами, шероховатостью поверхности и т. д. Поэтому анализ зависимости даже одной проекции (например, Hz) от пространственной координаты (x или y) может оказаться непростой задачей.
Рассмотрим магнитное поле рассеяния вблизи дефекта (рисунок 43). Здесь показана идеализированная бесконечно длинная трещина с ровными краями. Она вытянута вдоль оси y, которая направлена на рисунке к нам. Цифрами 1, 2, 3, 4 показано как меняется величина и направление вектора напряженности магнитного поля при приближении к трещине слева.

Рисунок 43 Магнитное поле рассеяния вблизи дефекта
Измерение магнитного поля происходит на некотором расстоянии от поверхности детали. Траектория, по которой проводятся измерения, изображена пунктиром. Величины и направления векторов справа от трещины можно построить аналогичным образом (или воспользоваться симметрией рисунка). Правее картины поля рассеяния показан пример пространственного положения вектора H и двух его составляющих Hx и Hz. Графики зависимостей проекций Hx и Hz поля рассеяния от координаты x показаны ниже.
Казалось бы, отыскивая экстремум Hx или ноль Hz, можно найти дефект. Но как уже отмечалось выше, поля рассеяния образуются не только от дефектов, но и от структурных неоднородностей металла, от следов механических воздействий и т. д.
Рассмотрим упрощенную картину формирования полей рассеяния на простой детали (рисунок 44) похожей на ту, что была изображена на рисунке 41, и графики зависимостей проекций Hz, Hx от координаты x (дефект вытянут вдоль оси y).
По графикам зависимостей Hx и Hz от x обнаружить дефект очень непросто, так как величины экстремумов Hx и Hz над дефектом и над неоднородностями соизмеримы.
Выход был найден, когда обнаружили, что в области дефекта максимальная скорость изменения (крутизна) напряженности магнитного поля какой-то координаты больше, чем другие максимумы.
Рисунок 44 показывает, что максимальная крутизна графика Hz(x) между точками x1 и x2 (т.е. в зоне расположения дефекта) гораздо больше, чем в других местах.
Таким образом, прибор должен измерять не проекцию напряженности поля, а «скорость» ее изменения, т.е. отношение разности проекций в двух соседних точках над поверхностью детали к расстоянию между этими точками:
 (10.5)
(10.5)
где Hz(x1), Hz(x2) — значения проекции вектора H на ось z в точках x1, x2 (левее и правее дефекта), Gz(x) принятоназывать градиентом напряженности магнитного поля.
Зависимость Gz(x) показана на рисунке 44. Расстояние Dx = x2 – x1 между точками, в которых измеряются проекции вектора H на ось z, выбирается с учетом размеров поля рассеяния дефекта.
Как следует из рисунка 44, и это хорошо согласуется с практикой, значение градиента над дефектом существенно больше его значения над неоднородностями металла детали. Именно это позволяет достоверно регистрировать дефект по превышению градиентом порогового значения (рисунок 44).
Выбирая необходимое значение порога, можно свести ошибки контроля к минимальным значениям.
Рисунок 44 Силовые линии магнитного поля дефекта и неоднородностей металла детали.
10.6 Феррозондовый метод
Феррозондовый метод основан на измерении феррозондовым прибором градиента напряженности магнитного поля рассеяния, созданного дефектом в намагниченном изделии, и сравнении результата измерения с порогом.
Вне контролируемой детали существует определенное магнитное поле, которое создается для ее намагничивания. Применение дефектоскопа — градиентометра обеспечивает выделение сигнала, вызванного дефектом, на фоне довольно большой медленно изменяющейся в пространстве составляющей напряженности магнитного поля.
В феррозондовом дефектоскопе используется преобразователь, реагирующий на составляющую градиента нормальной составляющей напряженности магнитного поля на поверхности детали. Преобразователь дефектоскопа содержит два параллельно расположенных стержня из специального магнитомягкого сплава. При контроле стержни перпендикулярны поверхности детали, т.е. параллельны нормальной составляющей напряженности магнитного поля. Стержни имеют одинаковые обмотки, по которым протекает переменный ток. Эти обмотки соединены последовательно. Переменный ток создает в стержнях переменные составляющие напряженности магнитного поля. Эти составляющие совпадают по величине и направлению. Кроме того, имеется постоянная составляющая напряженности магнитного поля детали в месте размещения каждого стержня. Величина Δx, которая входит в формулу (10.5), равна расстоянию между осями стержней и называется базой преобразователя. Выходное напряжение преобразователя определяется разностью переменных напряжений на обмотках.
Разместим преобразователь дефектоскопа на участке детали без дефекта, где значения напряженности магнитного поля в точках х1; х2 (см. формулу (10.5)) одинаковы. Это означает, что градиент напряженности магнитного поля равен нулю. Тогда на каждый стержень преобразователя будут действовать одинаковые постоянная и переменная составляющие напряженности магнитного поля. Эти составляющие будут одинаково перемагничивать стержни, поэтому напряжения на обмотках равны между собой. Разность напряжений, определяющая выходной сигнал, равна нулю. Таким образом, преобразователь дефектоскопа не реагирует на магнитное поле, если нет градиента.
Если градиент напряженности магнитного поля не равен нулю, то стержни будут находиться в одинаковом переменном магнитном поле, но постоянные составляющие будут разными. Каждый стержень перемагничивается переменным током обмотки от состояния с магнитной индукцией – ВS до + ВS Согласно закону электромагнитной индукции напряжение на обмотке может появиться только тогда, когда изменяется магнитная индукция. Поэтому период колебаний переменного тока может быть разбит на интервалы, когда стержень находится в насыщении и, следовательно, напряжение на обмотке равно нулю, и на промежутки времени, когда насыщения нет, а, значит, напряжение отличается от нуля. В те промежутки времени, когда оба стержня не намагничены до насыщения, на обмотках появляются одинаковые напряжения. В это время выходной сигнал равен нулю. То же самое будет при одновременном насыщении обоих стержней, когда напряжение на обмотках отсутствует. Выходное напряжение появляется тогда, когда один сердечник находится в насыщенном состоянии, а другой — в ненасыщенном.
Одновременное воздействие постоянной и переменной составляющей напряженности магнитного поля приводит к тому, что каждый сердечник находится в одном насыщенном состоянии более длительное время, чем в другом. Более длительному насыщению соответствует сложение постоянной и переменной составляющих напряженности магнитного поля, более короткому – вычитание. Разность между интервалами времени, которые соответствуют значениям магнитной индукции + ВS и – ВS, зависит от напряженности постоянного магнитного поля. Рассмотрим состояние с магнитной индукцией + ВS у двух стержней преобразователя. Неодинаковым значениям напряженности магнитного поля в точках х1 и х2 будет соответствовать разная длительность интервалов магнитного насыщения стержней. Чем больше разность между этими значениями напряженности магнитного поля, тем больше различаются временные интервалы. В те промежутки времени, когда один стержень насыщен, а другой — ненасыщен, возникает выходное напряжение преобразователя. Это напряжение зависит от градиента напряженности магнитного поля.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 4056; Нарушение авторских прав?; Мы поможем в написании вашей работы!