КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие о передаточной функции САУ
|
|
|
|
Класификация САУ
1. По способам формирования управляющего воздействия (см. осн. принципы управления).
2. По алгоритму функционирования:
· Стабилизирующие
· Программные
· Следящие
· Адаптивные
3. По свойствам в установившемся режиме:
· Статические - когда при постоянном возмущающем воздействии отклонение управляющей величины от заданного значения (ошибка) не равна 0.
· Астатическое - когда ошибка равна 0.
4. По характеру изменения величин, определяющих работу элемента:
· Непрерывные - между входными и выходными величинами всех элементов существует непрерывная функциональная связь.
· Дискретные - выходная величина хотя бы первого элемента носит дискретный характер, то есть является последовательностью импульсов.
5. По математическому описанию:
· Линейные САУ - описываются линейными дифференциальными уравнениями (даже при значительном отклонении регулируемой величины от заданного значения).
· Нелинейные САУ - описываются нелинейными дифференциальными уравнениями (но при малых отклонениях линеаризуются и система рассматривается как линейная).
· Существенно-нелинейные САУ - релейные.
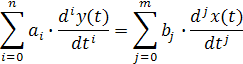
Любая линейная система описывается линейным ДУ.
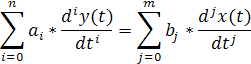
х(t)-входной сигнал.
y(t)-выходной сигнал.
Правая часть- вынуждающая функция.
Если считать,что она отсутствует то получаем:

Данное выражение определяет собственные колебания системы.
Подвергаем уравнение преобразованию Лапласа, считая начальные условия нулевыми:
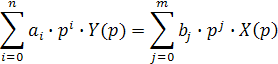
При условии, что m<=n.
Степень полинома числителя должна быть не больше степени полинома знаменателя.
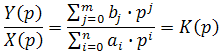
К(р) –передаточная функция системы. Это отношение изображения выходного сигнала к изображению входного при нулевых начальных условиях.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 847; Нарушение авторских прав?; Мы поможем в написании вашей работы!