КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример К2
|
|
|
|
 Механизм (рис. К2,а) состоит из стержней 1, 2, 3, 4 и ползуна
Механизм (рис. К2,а) состоит из стержней 1, 2, 3, 4 и ползуна  , соединенных друг с другом и с неподвижными опорами
, соединенных друг с другом и с неподвижными опорами  и
и  шарнирами.
шарнирами.
 Дано:
Дано:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  м,
м,  м,
м,  м,
м,  с-1,
с-1,  с-2 (направления
с-2 (направления  и
и  – против хода часовой стрелки).
– против хода часовой стрелки).
Определить:  ,
,  ,
,  ,
,  .
.
Решение:
1. Строим положение механизма в соответствии с заданными углами и выбранным масштабом длин (рис. К2,б; на этом рисунке изображаем все векторы скоростей).
 2. Определяем . Точка принадлежит стержню
2. Определяем . Точка принадлежит стержню  . Чтобы найти , надо знать скорость какой-нибудь другой точки этого стержня и направление
. Чтобы найти , надо знать скорость какой-нибудь другой точки этого стержня и направление  . По данным задачи, учитывая направление
. По данным задачи, учитывая направление  , можем определить
, можем определить  . Численно:
. Численно:
 м/с,
м/с,
 . (1)
. (1)
 Направление найдем, учтя, что точка принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная и направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) на прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
Направление найдем, учтя, что точка принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная и направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) на прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
 ,
,  м/с. (2)
м/с. (2)
3. Определяем  . Точка
. Точка  принадлежит стержню
принадлежит стержню  . Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки
. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки  , принадлежащей одновременно стержню . Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня . Это точка
, принадлежащей одновременно стержню . Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня . Это точка  , лежащая на пересечении перпендикуляров к и , восставленных из точек
, лежащая на пересечении перпендикуляров к и , восставленных из точек  и (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня вокруг МЦС . Вектор
и (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня вокруг МЦС . Вектор  перпендикулярен отрезку
перпендикулярен отрезку  , соединяющему точки и , и направлен в сторону поворота. Величину
, соединяющему точки и , и направлен в сторону поворота. Величину  найдем из пропорции:
найдем из пропорции:
 . (3)
. (3)
Чтобы вычислить и  , заметим, что
, заметим, что  – прямоугольный, так как острые углы в нем равны 30° и 60°, и что
– прямоугольный, так как острые углы в нем равны 30° и 60°, и что  . Тогда
. Тогда  является равносторонним и
является равносторонним и  . В результате равенство (3) дает
. В результате равенство (3) дает
 м/с,
м/с,  . (4)
. (4)
Так как точка принадлежит одновременно стержню  , вращающемуся вокруг , то
, вращающемуся вокруг , то  . Тогда, восставляя из точек и перпендикуляры к скоростям и , построим МЦС
. Тогда, восставляя из точек и перпендикуляры к скоростям и , построим МЦС  стержня . По направлению вектора определяем направление поворота стержня вокруг центра . Вектор направлен в сторону поворота этого стержня. Из рис. К2,б видно, что
стержня . По направлению вектора определяем направление поворота стержня вокруг центра . Вектор направлен в сторону поворота этого стержня. Из рис. К2,б видно, что  , откуда
, откуда  . Составив теперь пропорцию, найдем, что
. Составив теперь пропорцию, найдем, что
 ,
,  м/с. (5)
м/с. (5)
4. Определяем . Так как МЦС стержня 2 известен (точка ) и  м, то
м, то
 с–1. (6)
с–1. (6)
5. Определяем  (рис. К2,в, на котором изображаем все
(рис. К2,в, на котором изображаем все 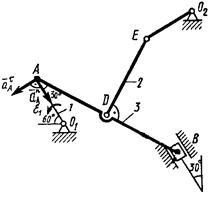 векторы ускорений). Точка принадлежит стержню 1. Полное ускорение точки разложим на тангенциальную и нормальную составляющие:
векторы ускорений). Точка принадлежит стержню 1. Полное ускорение точки разложим на тангенциальную и нормальную составляющие:
 ,
,
где численно
 м/с2,
м/с2,
 м/с2. (7)
м/с2. (7)
 Вектор
Вектор  направлен вдоль
направлен вдоль  , а
, а  – перпендикулярно . Изображаем эти векторы на чертеже (см. рис. К2в). Вычисляем
– перпендикулярно . Изображаем эти векторы на чертеже (см. рис. К2в). Вычисляем
 м/с2.
м/с2.
Ответ: м/с,  м/с,
м/с,  с–1,
с–1,  м/с2.
м/с2.
КОНТРОЛЬНЫЕ ВОПРОСЫ
Задача С1
1) Основные виды силовых воздействий и их свойства:
– сосредоточенная сила (проекции силы на оси; момент силы относительно точки как характеристика вращательного действия силы; величина и знак алгебраического момента;
– вращающий момент (пара сил), изображение пары на плоскости, момент пары;
– распределенные силы с постоянной интенсивностью (эпюра распределенных сил, приведение к равнодействующей).
2) Силы активные и реакции связей. Внешние закрепления конструкции (подвижный и неподвижный цилиндрические шарниры, скользящая заделка – втулка, жесткая заделка, невесомый стержень, нить, идеальная поверхность). Как направлены реакции этих связей? Сколько неизвестных составляющих реакции имеет каждая из перечисленных связей? В каком случае реакция связи содержит вращающий момент?
3) Виды представленных в конструкциях соединений тел между собой. Метод разбиения. Внутренние двусторонние и односторонние связи.
4) Каковы аналитические условия равновесия произвольной плоской системы сил?
5) Статическая определимость и неопределимость конструкции. Какие дополнительные условия представлены в задаче, которые делают конструкцию статически определимой? Как определяется статическая определимость в сочлененных конструкциях?
Задача К1
1) Координатный способ задания движения точки.
2) Определение скорости точки. Нахождение скорости при координатном способе задания движения.
3) Определение ускорения. Разложение ускорения на касательную и нормальную составляющие.
4) Естественный способ изучения движения. Определение кинематических характеристик в естественных координатах.
Задача К2
1) Виды движений различных звеньев плоского механизма задачи К2.
2) Поступательное движение.
3) Вращательное движение вокруг неподвижной оси (центра  ). Угловая скорость и угловое ускорение вращающихся звеньев. Как направлены и чему равны скорости точек вращающегося тела?
). Угловая скорость и угловое ускорение вращающихся звеньев. Как направлены и чему равны скорости точек вращающегося тела?
4) Плоскопараллельное движение. Мгновенный центр скоростей и его свойства. Как найдены МЦС звеньев механизма задачи?
5) Как формулируется теорема о проекциях скоростей двух точек тела? Как она используется для нахождения скоростей различных точек механизма?
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 532; Нарушение авторских прав?; Мы поможем в написании вашей работы!