КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура системы диспетчерского управления
|
|
|
|
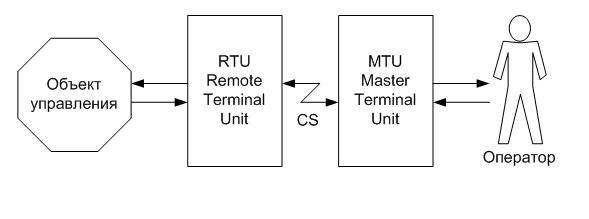
Структура SCADA -системы. Все современные SCADA -системы являются в свою очередь СРВ и включают три основных структурных компонента (рис. 3.1).
Remote Terminal Unit (RTU) удаленный терминал, осуществляющий обработку задачи (управление) в режиме реального времени, и включает в свой состав от датчиков для съема информации с объекта до специализированных многопроцессорных отказоустойчивых вычислительных комплексов, осуществляющих обработку информации и управление в режиме жесткого реального времени. Конкретная его реализация определяется конкретным применением. Использование устройств низкоуровневой обработки информации позволяет снизить требования к пропускной способности каналов связи с центральным диспетчерским пунктом.
|
| Рис. 3.1. Основные структурные компоненты Scada-системы |
Master Terminal Unit (MTU) – диспетчерский пункт управления или главный терминал, осуществляющий обработку данных и управление высокого уровня, как правило, в режиме «мягкого» РВ.
Важнейшей функцией MTU является обеспечение эффективного интерфейса между человеком-оператором и Scada –системой (HMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
Communication System (CS)коммуникационная система,т.е. каналы связи, необходимые для передачи данных с удаленных точек (объектов, терминалов) на центральный интерфейс оператора-диспетчера и передачи сигналов управления на RTU (или удаленный объект в зависимости от конкретного исполнения системы).
Цели создания системы:
· перевод контроля и управления процессом на компьютерную систему управления с расширением функций управления;
· обеспечение надежной и эффективной работы технологического объекта за счет управления режимами его работы в соответствии с требованием технологического регламента;
· повышение уровня безопасности производственного процесса и уменьшение вероятности возникновения аварийных ситуаций за счет более полного оперативного контроля технологических операций;
· повышение уровня управляемости объекта за счет организации сети;
· повышение информационного обеспечения технологического и эксплуатационного персонала;
· облегчение условий и повышение культуры труда оперативного и технического персонала.
Система обеспечивает:
– централизованный контроль работы технологического оборудования;
– сигнализацию отклонений параметров от норм технологического регламента;
– дистанционное управление исполнительными механизмами (ИМ);
– визуализация информации о процессе;
– выполнение необходимых расчетов материальных потоков;
– формирование и печать отчетных документов.
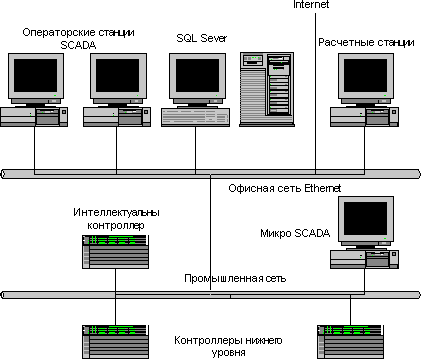
Функциональная схема. Система управления является двухуровневой и строится в соответствии с технологической структурой объекта управления. Типовой пример структуры системы приведен на рис. 3.2.
Нижний уровень – уровень объекта (контроллерный) – включает различные датчики для сбора информации о ходе технологического процесса, электроприводы и исполнительные механизмы для реализации регулирующих и управляющих воздействий. Датчики поставляютинформацию локальным программируемым логическим контроллерам (PLC), которые могут выполнять следующие функции:
|
| Рис. 3.2. Типовой пример реализации системы управления |
· сбор информации об измеряемых технологических параметрах процесса;
· сигнализация о выходе их за заданные пределы;
·управление электроприводами и другими исполнительными механизмами;
·решение задач автоматического логического управления;
· противоаварийная защита (ПАЗ) процесса по факту аварийных событий;
· передача информации о состоянии объекта на верхний уровень.
Так как информация в контроллерах предварительно обрабатывается и частично используется на месте, существенно снижаются требования к пропускной способности каналов связи.
К аппаратно-программным средствам контроллерного уровня управления предъявляются жесткие требования по надежности, времени реакции на исполнительные устройства, датчики и т.д. Программируемые логические контроллеры должны гарантированно откликаться на внешние события, поступающие от объекта, за время, определенное для каждого события. Для критичных с этой точки зрения объектов рекомендуется использовать контроллеры с операционными системами реального времени (ОСРВ). Контроллеры под управлением ОСРВ функционируют в режиме жесткого реального времени.
Разработка, отладка и исполнение программ управления локальными контроллерами осуществляется с помощью специализированного программного обеспечения. К этому классу инструментального ПО относятся пакеты типа ISaGRAF (CJ International France), InConrol (Wonderware, USA), Paradym 31 (Intellution, USA), имеющие открытую архитектуру.
Информация с локальных контроллеров может направляться в сеть диспетчерского пункта непосредственно, а также через контроллеры верхнего уровня (рис. 3.2). В зависимости от поставленной задачи контроллеры верхнего уровня (концентраторы, интеллектуальные или коммуникационные контроллеры) реализуют различные функции. Некоторые из них перечислены ниже:
· сбор данных с локальных контроллеров;
· обработка данных, включая масштабирование;
· поддержание единого времени в системе;
· синхронизация работы подсистем;
· организация архивов по выбранным параметрам;
· обмен информацией между локальными контроллерами и верхним уровнем;
· работа в автономном режиме при нарушениях связи с верхним уровнем;
· резервирование каналов передачи данных и др.
Верхний уровень – диспетчерский пункт (ДП) – включает одну или несколько станций управления, представляющих собой автоматизированное рабочее место (АРМ) диспетчера/оператора, сервер базы данных, рабочие места (компьютеры) для специалистов, интерфейс оператора с возможностями управления установкой и регистрации событий, экранные кадры визуализации технологического процесса (мнемосхемы), а также программное обеспечение. Часто в качестве рабочих станций используются ПЭВМ типа IBM PC различных конфигураций.
Станции управления предназначены для отображения хода технологического процесса и оперативного управления. Эти задачи и призваны решать SCADA – системы. SCADА – это специализированное программное обеспечение, ориентированное на обеспечение интерфейса между диспетчером и системой управления, а также коммуникацию с внешним миром.
Функции верхнего уровня определяются ролью SCADA в системах управления и реализованы во всех пакетах:
· автоматизированная разработка, дающая возможность создания ПО системы автоматизации без реального программирования;
· средства исполнения прикладных программ;
· обработка первичной информации;
· регистрация алармов и исторических данных;
· хранение информации с возможностью ее пост-обработки (как правило, реализуется через интерфейсы к наиболее популярным базам данных);
· визуализация информации в виде мнемосхем, графиков и т.п.;
· возможность работы прикладной системы с наборами параметров, рассматриваемых как "единое целое" (" recipe " или "установки");
· оперативное дистанционное управление объектом.
Функции программного обеспечения АРМ – оператора:
· сбор данных с использованием требуемых драйверов ввода/вывода;
· обработка данных и формирование оперативной и исторической базы данных;
· анализ нарушений и аварийных ситуаций, сигнализация нарушений, ведение и отображение журнала аварийных ситуаций;
· отображение состояния технологического процесса в виде мнемосхем, таблиц и т.д. на основе многооконного интерфейса;
· анализ истории протекания процесса и его текущего состояния на основе трендов параметров;
· обеспечение безопасности системы управления посредством системы паролей и прав доступа;
· функции формирования и печати отчетных и учетных документов выполняется средствами базы данных Microsoft Access.
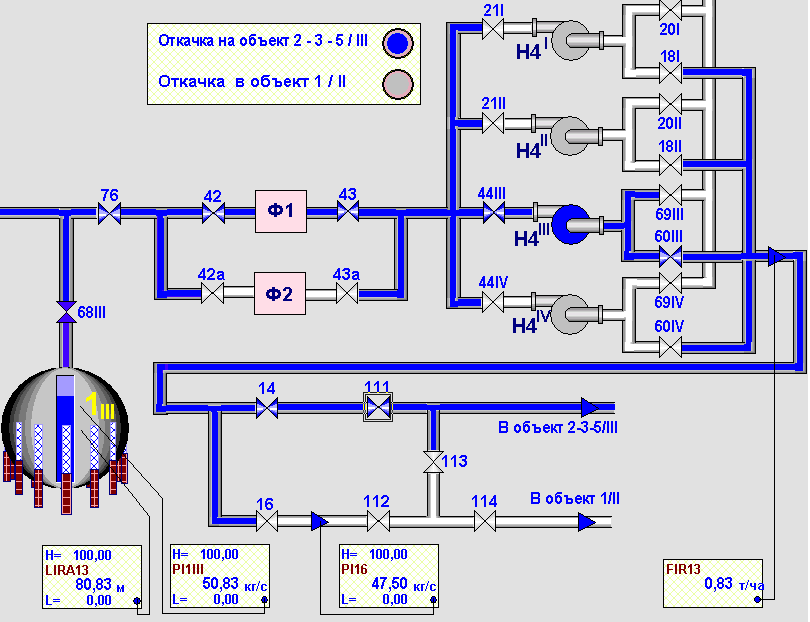
Операторский интерфейс. Одной из основных задач,решаемых SCADA -системами, является обеспечение высокого уровня сервиса при представлении информации о процессе (рис. 3.3). Основным средством представления информации оператору является цветной графический дисплей. Для операторского интерфейса предусмотрена система защиты от несанкционированного доступа к изменяемым параметрам системы. Система обеспечивает прямое взаимодействие с процессом через системную графику (дистанционное управление). После обучения и сертификации пользователь имеет возможность добавлять необходимое количество экранов и функций.
|
| Рис. 3.3. Схема технологического участка и состояние процесса на экране |
Составной частью графического интерфейса являются формы (экраны) с изображением мнемосхем технологического процесса. При загрузке появляется главная форма с обобщенной информацией о состоянии объекта. Технологические участки изображены на вспомогательных экранах. Переключение между экранами происходит с помощью панели управления, расположенной в верхней части экрана. Состояние технологических операций отображается на панелях индикаторов. Активные процессы выделяются цветом. В нормальной ситуации цвет индикатора активного процесса – зеленый. В случае возникновения аварийной ситуации цвет индикатора меняется на красный и сопровождается зуммером. Активный технологически процесс индицируется на экране и выделяется соответствующим цветом труб, насосов и задвижек. На отдельных вспомогательных экранах отражаются тренды состояния основных аналоговых сигналов и тревоги как по данным реального времени, так и из файлов архива. Для архивирования данных по тревогам, а также с целью формирования суточных отчетов и предварительного баланса, причем отчеты сохраняются в файлах и могут быть просмотрены с помощью Microsoft Office или распечатаны на принтере.
SCADA -системы верхнего уровня в общем случае являются универсальными, однако следует выделять Micro-SCADA – системы, реализующие стандартные (базовые) функции, ориентированные на решение задач автоматизации в определенной отрасли.
Все компоненты системы управления объединены между собой каналами связи. Обеспечение взаимодействия SCADA - систем с локальными контроллерами, контроллерами верхнего уровня, офисными и промышленными сетями возложено на так называемое коммуникационное ПО. Это достаточно широкий класс программного обеспечения, выбор которого для конкретной системы управления определяется многими факторами, в том числе и типом применяемых контроллеров, и используемой SCADA - системой.
Большой объем информации, непрерывно поступающий с устройств ввода/вывода систем управления, предопределяет наличие в них баз данных (БД). Основная задача БД–своевременно обеспечить пользователя всех уровней управления требуемой информацией. На верхних уровнях АСУ эта задача решается с помощью традиционных БД. На уровне АСУ ТП регистрация информации в реальном времени решается на базе ПО интеллектуальных контроллеров и SCADA – систем, для которых в последнее время появились новые возможности по обеспечению высокоскоростного хранения информации в БД.
Организация взаимодействия с контроллерами. Современные SCADA -системы не ограничивают выбора аппаратуры нижнего уровня контроллеров, предоставляя большой набор драйверов или серверов ввода/вывода и средств создания собственных программных модулей или драйверов новых устройств нижнего уровня.
Для подсоединения драйверов ввода/вывода к SCADA -системе в настоящее время используются следующие механизмы:
· ставший стандартом протокол динамического обмена данными (DDE);
· собственные протоколы фирм-производителей SCADA -систем, реально обеспечивающие самый скоростной обмен данными;
· новый OPC - протокол, который, с одной стороны, является стандартным и поддерживается большинством SCADA - систем, а с другой стороны, лишен недостатков протоколов DDE.
Изначально протокол DDE применялся в первых человеко - машинных интерфейсах в качестве механизма разделения данных между прикладными системами и устройствами типа PLC. Для повышения надежности и скорости обмена протокола DDE используют протоколы AdvancedDDE или FastDDE, связанные с пакетированием информации при обмене с PLC и сетевыми контроллерами. Но такие частные решения приводят к ряду проблем:
· для каждой SCADA –системы пишется свой драйвер для поставляемого на рынок оборудования;
· в общем случае, два пакета не могут иметь доступ к одному драйверу в одно и то же время, поскольку каждый из них поддерживает обмен именно со своим драйвером.
Основная цель OPC стандарта (OLE for Process Control) заключается в определении механизма доступа к данным с любого устройства из приложений. OPC позволяет производителям оборудования поставлять программные компоненты, которые стандартным способом обеспечат клиентов данными с PLC. При широком распространении OPC - стандарта появятся следующие преимущества:
· OPC позволяют определять на уровне объектов различные системы управления и контроля, работающие в распределенной гетерогенной (неоднородной) среде;
· OPC – устраняют необходимость использования различного нестандартного оборудования и соответствующих коммуникационных программных драйверов;
· у потребителя появится больший выбор при разработке приложений.
С OPC -решениями интеграция в гетерогенные системы становится достаточно простой. Применительно к SCADA -системам OPC серверы, расположенные на всех компьютерах системы управления производственного предприятия, стандартным способом поставляют данные в программу визуализации, базы данных и т. п., уничтожая, в некотором смысле, само понятие неоднородной системы.
Аппаратная реализация связи с устройствами вода/вывода. Для организации взаимодействия с контроллерами могут быть использованы следующие аппаратные средства:
· COM -порты, когда контроллер или объединенные сетью контроллеры подключаются по протоколам RS -232, RS -422, RS -485;
· сетевые платы для контроллеров, снабженных интерфейсным выходом на Ethernet;
· вставные платы, когда протокол взаимодействия определяется платой и могут быть уникальными, реализованные в стандартах ISA, PCI, CompactPCI.
Тренды в SCADA -системах. Графическое представление значений технологических параметров во времени способствует лучшему пониманию динамики технологического процесса предприятия. Поэтому подсистема создания трендов и хранения информации о параметрах с целью ее дальнейшего анализа и использования для управления является неотъемлемой частью любой SCADA -системы.
Тренды реального времени (Real Time) отображают динамические изменения параметра в текущем времени. При появлении нового значения параметра в окне тренда происходит прокрутка графика справа налево. Тренды становятся историческими (Historical) после того, как данные будут записаны на диск и можно будет использовать режим прокрутки предыдущих значений назад с целью просмотра прошлых значений. Отображаемые данные тренда в таком режиме будут неподвижны и отображаются за определенный период.
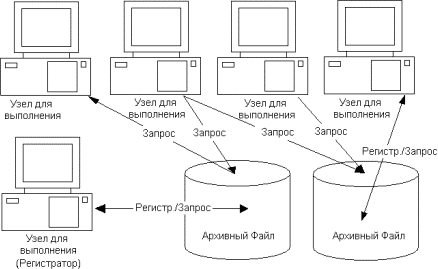
Система распределенных архивов. В InTouch имеется система распределенных архивов, обеспечивающая поиск архивных данных в любом InTouch –приложении. Данная система расширяет возможности стандартных архивов InTouch, позволяя одновременно получать информацию из нескольких удаленных баз данных, которые называются провайдерами архивов. Одновременно можно обращаться к восьми провайдерам. Каждый узел, выполняющий функцию регистрации, может писать только в один архив.
|
| Рис. 3.4. Распределенная система архивов |
Система, приведенная на рис. 3.4, имеет два провайдера архивов. Левый провайдер регистрирует информацию из узла, расположенного слева внизу. Правый провайдер регистрирует информацию из узла, расположенного справа вверху. Остальные три узла (вверху слева) лишь используют архивныеданные. Читать информацию из архивных файлов может каждый из узлов системы. Создание такой системы предполагает следующие действия:
· создание списка провайдеров архивов;
· создание и определение параметров объекта "архивный тренд";
· конфигурирование приложения на удаленное архивирование данных;
· копирование приложения на все узлы.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 3609; Нарушение авторских прав?; Мы поможем в написании вашей работы!