КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение для шестого сочленения
|
|
|
|
Решение для пятого сочленения
Для определения  принимаем, что ось шестого сочленения совпадает с заданным вектором подхода (a= z 5). Проецируем систему координат (x 5, y 5, z 5) на плоскость x 4 y 4 (рис. 8.3). Тогда:
принимаем, что ось шестого сочленения совпадает с заданным вектором подхода (a= z 5). Проецируем систему координат (x 5, y 5, z 5) на плоскость x 4 y 4 (рис. 8.3). Тогда:
 ,
,  , (8-16)
, (8-16)
где  и
и  - соответственно первый и второй столбцы матрицы
- соответственно первый и второй столбцы матрицы  ,
,
a –вектор подхода.
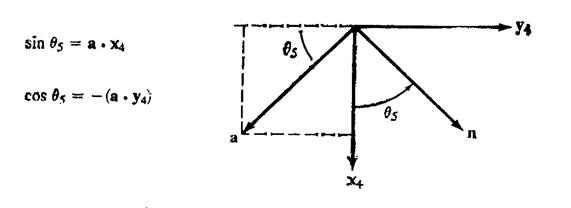
Рисунок 8.3. Решение для 5-го сочленения
Таким образом, получено решение для :
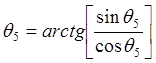 =
=
=  ,
,
 . (8-17)
. (8-17)
Если  , имеет место вырожденный случай.
, имеет место вырожденный случай.
Необходимо получить такую ориентацию схвата, чтобы поднять объект манипулирования. Для этого надо так расположить схват, чтобы s = y 6. Проецируя систему координат схвата (n, s, a) на плоскость x 5 y 5, получаем (рис. 8.4):
 ,
,  , (8-18)
, (8-18)
где  - второй столбцы матрицы
- второй столбцы матрицы  , a n и s – соответственно нормальный и касательный векторы матрицы
, a n и s – соответственно нормальный и касательный векторы матрицы  .
.
Таким образом, для  имеем:
имеем:
 =
=
=  ,
,
 . (8-19)
. (8-19)
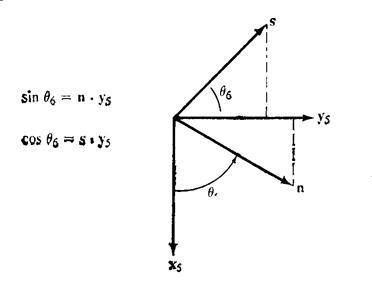
Рисунок 8.4. Решение для 6-го сочленения
Итак, для шестизвенного манипулятора «Пума» существует восемь решений обратной задачи кинематики. Решения для первых трёх присоединённых углов  обеспечивают требуемое расположение руки (первых трёх звеньев), а углы
обеспечивают требуемое расположение руки (первых трёх звеньев), а углы  обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
(8-7), (8-15), (8-17), (8-19) дают решение  обратной задачи кинематики, причем
обратной задачи кинематики, причем  также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 406; Нарушение авторских прав?; Мы поможем в написании вашей работы!