КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнение движения манипулятора
|
|
|
|
Потенциальная энергия манипулятора
Обозначим полную потенциальную энергию манипулятора через Р, а потенциальную энергию i -го звена – через  . Тогда:
. Тогда:
 . (10-8)
. (10-8)
Суммируя потенциальные энергии всех звеньев, получаем:
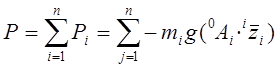 . (10-9)
. (10-9)
Здесь  - вектор-строка, описывающая гравитационное ускорение в базовой системе координат. В земной системе координат
- вектор-строка, описывающая гравитационное ускорение в базовой системе координат. В земной системе координат  , а g – ускорение свободного падения на поверхности Земли (g =9,8062 м/с2).
, а g – ускорение свободного падения на поверхности Земли (g =9,8062 м/с2).
Используя равенства (10-7) и (10-9), запишем выражение для функции Лагранжа:
 . (10-10)
. (10-10)
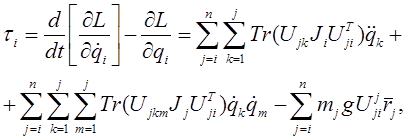
Подставив это выражение в уравнение Лагранжа, получим выражение для обобщённой силы  , которую должен развить силовой привод i -го сочленения, чтобы реализовать задание движение i -го звена манипулятора:
, которую должен развить силовой привод i -го сочленения, чтобы реализовать задание движение i -го звена манипулятора:
 (10-11)
(10-11)
 .
.
Выражение (10-11) можно представить в более простой форме:
 ,
,  , (10-12)
, (10-12)
или в матричном виде:
 , (10-13)
, (10-13)
где  - вектор (размерностью n ×1) обобщённых сил, создаваемых силовыми приводами в сочленениях манипулятора:
- вектор (размерностью n ×1) обобщённых сил, создаваемых силовыми приводами в сочленениях манипулятора:
 ; (10-14)
; (10-14)
 - вектор (размерностью n ×1) присоединенных переменных манипулятора:
- вектор (размерностью n ×1) присоединенных переменных манипулятора:
 ; (10-15)
; (10-15)
 - вектор (размерностью n ×1) обобщённых скоростей:
- вектор (размерностью n ×1) обобщённых скоростей:
 ; (10-16)
; (10-16)
 - вектор (размерностью n ×1) обобщённых ускорений:
- вектор (размерностью n ×1) обобщённых ускорений:
 ; (10-17)
; (10-17)
D(q) – симметричная матрица размерностью n × n, элементы которой даются выражением:
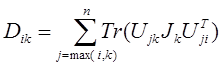 ,
,  ; (10-18)
; (10-18)
 - вектор (размерностью n ×1) кориолисовых и центробежных сил:
- вектор (размерностью n ×1) кориолисовых и центробежных сил:
 ,
,
 ,
,  , (10-19)
, (10-19)
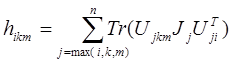 , ; (10-20)
, ; (10-20)
 - вектор (размерностью n ×1) гравитационных сил:
- вектор (размерностью n ×1) гравитационных сил:
 ,
,
 . (10-21)
. (10-21)
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 674; Нарушение авторских прав?; Мы поможем в написании вашей работы!